
ESP32 เบื้องต้น :: บทที่ 9 การขับอุปกรณ์กำลังสูง
อุปกรณ์กำลังสูงในที่นี้จะหมายถึง อุปกรณ์ที่ไม่สามารถนำ ESP32 เข้าไปควบคุมตรง ๆ ได้ เช่น มอเตอร์ หลอดไฟกำลังสูง หลอดไฟ 220VAC เครื่องใช้ไฟฟ้าต่าง ๆ เป็นต้น ซึ่งในบทนี้เราจะมีเรียนรู้วิธีการใช้อุปกรณ์ต่าง ๆ ช่วยให้ ESP32 สามารถขับอุปกรณ์กำลังสูงเหล่านั้นได้โดยไม่เกิดความเสียหายกับตัว ESP32
การขับอุปกรณ์ใช้ไฟฟ้ากระแสตรง
การขับจะหมายถึงการทำให้อุปกรณ์สามารถทำงานได้ใน 2 โหมด คือเปิด และปิด สำหรับการทำให้อุปกรณ์ที่ใช้ไฟฟ้ากระแสตรงสามารถทำงานได้ใน 2 โหมดนี้ สามารถเลือกใช้งานอุปกรณ์ช่วยขับได้ดังนี้
ขับอุปกรณ์ใช้ไฟฟ้ากระแสตรงด้วยรีเลย์
รีเลย์ (Relay) คืออุปกรณ์อิเล็กทรอนิกส์ที่ทำหน้าที่คล้ายสวิตซ์ในการควบคุมการจ่ายพลังงานไฟฟ้า รีเลย์จะมีแรงดันที่ใช้ในการขับอยู่เช่นเดียวกัน และตัวรีเลย์เองก็ถือเป็นอุปกรณ์กำลังสูงที่ต้องใช้ทรานซิสเตอร์มาช่วยขับด้วย แต่ในการใช้งานมักจะเลือกใช้งานแบบโมดูลสำเร็จรูปเพียงต่อสัญญาณเข้า ไฟเลี้ยง และอุปกรณ์ที่ต้องการควบคุมก็สามารถใช้งานได้ทันที
รีเลย์จะแบ่งเป็น 2 แบบ ดังนี้
รีเลย์แบบขดลวด – เป็นรีเลย์ที่มีส่วนประกอบของขดลวดเหนี่ยวนำ และหน้าคอนเทค หลักการคือเมื่อเกิดความเหนี่ยวนำขึ้นจะทำให้คอนเทคถูกดึงด้วยสนามแม่เหล็กมาชนกัน ทำให้พลังงานไฟฟ้าสามารถไหลผ่านไปได้ ทั้งนี้ข้อเสียของรีเลย์แบบนี้คือเมื่อหน้าคอนเทคมีการสัมผัสกันจะทำให้เกิดการอาร์คขึ้น รวมทั้งต้องใช้กระแสไฟฟ้าจำนวนหนึ่งในการจ่ายไปให้ขดลวดเหนี่ยวนำ
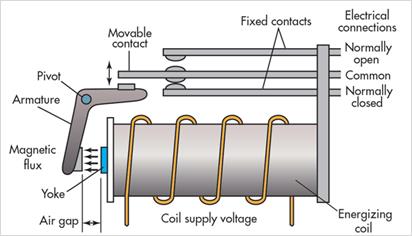
รูปที่ 8.1 ส่วนประกอบของรีเลย์แบบขดลวด
รีเลย์แบบขดลวดจะแบ่งย่อยได้ตามหน้าคอนเทคที่มีภายใน สำหรับรีเลย์ที่นิยมใช้มักมีหน้าคอนเทคเดียวและมีขาต่อใช้งานจำนวน 5 ขา คือ ขาขดลวดเหนี่ยวนำ 2 ขา และขาควบคุมอุปกรณ์อื่นจำนวน 3 ขา ขาควบคุมอุปกรณ์อื่นจะแยกได้เป็นขา NC (Normally Close) COM (Common) และ NO (Normally Open) การใช้งานส่วนใหญ่จะใช้ขา NO และ COM
การใช้งานโมดูลรีเลย์สำเร็จรูปจะคำนึงถึงแรงดันไฟฟ้าที่ใช้ขับรีเลย์ และจำนวนรีเลย์ที่ต้องการใช้เป็นหลัก สำหรับ ESP32 ไม่มีโมดูลรีเลย์สำเร็จรูปที่ใช้แรงดันไฟฟ้า 3.3V แต่สามารถใช้รีเลย์สำเร็จรูปที่ใช้แรงดันไฟฟ้า 5V ได้ โดยสามารถดึงแรงดันไฟฟ้า 5V มาจ่ายให้กับโมดูลรีเลย์ได้จากช่อง Vin ของบอร์ด NodeMCU-32S ซึ่งแรงดันไฟฟ้า 5V จะมาจากพอร์ต MicroUSB
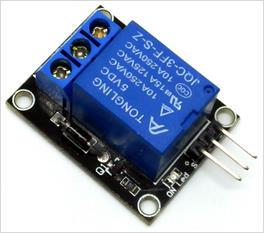
รูปที่ 8.2 โมดูลรีเลย์สำเร็จรูป 1 ช่อง ใช้แรงดัน 5V
ในการทดลองจะใช้รีเลย์ในการขับมอเตอร์ ซึ่งสามารถต่อวงจรได้ดังนี้ ท่านสามารถเปลี่ยนแหล่งจ่ายไปตามแรงดันที่มอเตอร์ต้องการได้ เช่น มอเตอร์ 12VDC ควรใช้แหล่งจ่ายเป็นแบตเตอรี่ 12V หรือเพาเวอร์ซัพพลายที่มีกระแสมากพอจะจ่ายให้กับมอเตอร์
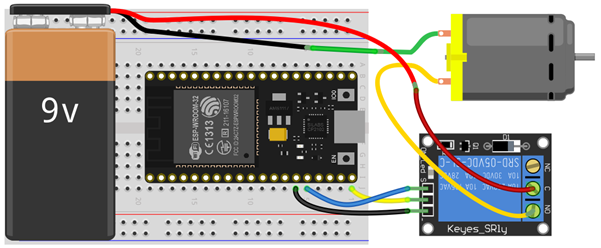
สำหรับโมดูลรีเลย์แต่ละรุ่นจะใช้สถานะในการทำงานไม่เหมือนกัน ในบางรุ่นโดยเฉพาะรุ่นรีเลย์ 2 ช่อง จะทำงานแบบ Active LOW ดังนั้นเมื่อต้องการให้มอเตอร์ทำงานจึงต้องจ่ายสถานะ LOW ให้รีเลย์
แต่สำหรับโมดูลรุ่น 1 ช่องมีหน้าตาแบบที่ยกมานี้จะใช้การทำงานแบบ Active HIGH ดังนั้นหากต้องการให้มอเตอร์ทำงานสามารถสั่ง HIGH ได้เลย
หลังจากต่อวงจรแล้ว ให้เข้าไปคัดลอกโค้ดโปรแกรมที่ https://goo.gl/EeSi64 จากนั้นนำมาอัพโหลดลงบอร์ด NodeMCU-32S ได้เลย และหลังจากอัพโหลดโปรแกรมแล้ว ให้ทดลองกดปุ่ม IO0 จะพบว่ามอเตอร์หมุน และหากกดอีกครั้ง มอเตอร์จะหยุดหมุน ทั้งนี้ทุกครั้งที่กดปุ่มจะได้ยินเสียงของรีเลย์ซึ่งเป็นเสียงของหน้าคอนเทคสัมผัสกัน
โค้ดที่ได้ทดลองมีดังนี้
บรรทัดที่ 1 ประกาศให้ BTN_PIN แทนเลข 0
บรรทัดที่ 2 ประกาศให้ RELAY_PIN แทนเลข 13
บรรทัดที่ 4 สร้างฟังก์ชั่น setup
บรรทัดที่ 5 กำหนดให้ขาใน BTN_PIN มีสถานะเป็นอินพุตแบบดิจิตอล
บรรทัดที่ 6 กำหนดให้ขาใน มีสถานะเป็นเอาต์พุตแบบดิจิตอล
บรรทัดที่ 7 จบคำสั่งในฟังก์ชั่น setup
บรรทัดที่ 9 สร้างฟังก์ชั่น loop
บรรทัดที่ 10 เปรียบเทียบว่ามีการกดสวิตซ์หรือไม่ ถ้ามีการกดสวิตซ์ให้ทำคำสั่งในปีกกา
บรรทัดที่ 11 วนรอบรอจนกว่าจะปล่อยสวิตซ์
บรรทัดที่ 12 สลับสถานะทางดิจิตอลของขาใน RELAY_PIN
บรรทัดที่ 13 จบคำสั่งใน if
บรรทัดที่ 14 จบคำสั่งในฟังก์ชั่น loop
โซลิตสเตตรีเลย์ – เป็นรีเลย์ที่ทำมาจากอุปกรณ์อิเล็กทรอนิกส์ ไม่มีหน้าสัมผัส มักใช้มอสเฟส หรือไทรแอคในการในการขับ ในส่วนของวงจรขับมักแยกออกจากวงจรควบคุมด้วยออปโต้คัปเปลอร์
โมดูลโซลิสสเตตรีเลย์สำเร็จรูปมักแบ่งตามชนิดของกระแสไฟฟ้าที่ใช้ คือ ใช้กับไฟฟ้ากระแสตรง โดยทำมาจากมอสเฟส หรือทรานซิสเตอร์ และใช้กับไฟฟ้ากระแสสลับ โดยทำมาจากไทรแอค
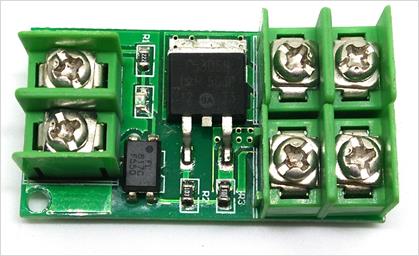
รูปที่ 8.3 โมดูลโซลิตสเตตรีเลย์สำหรับไฟฟ้ากระแสตรงใช้มอสเฟส
การควบคุมอุปกรณ์ใช้ไฟฟ้ากระแสตรง
การควบคุมอุปกรณ์ไฟฟ้ากระแสตรงจะแบ่งอุปกรณ์ได้ 2 แบบ คืออุปกรณ์แบบขดลวดความร้อน และมอเตอร์ อุปกรณ์ทั้ง 2 มีความแตกต่างกันที่ ขดลวดความร้อน หลอดไฟ และอุปกรณ์ขดลวดอื่น ๆ จะควบคุมการจ่ายพลังงานเท่านั้น ซึ่งใช้การควบคุมแบบทางเดียว แต่การควบคุมมอเตอร์จะต้องใช้การควบคุมแบบ 2 ทาง คือการควบคุมความเร็วในการหมุน และการควบคุมทิศทางที่หมุน การควบคุมอุปกรณ์ทั้ง 2 แบบจะใช้อุปกรณ์ช่วยควบคุมที่ต่างกัน
การควบคุมอุปกรณ์แบบขดลวดความร้อน
การควบคุมหลอดไฟ หรือขดลวดความร้อนไฟฟ้ากระแสตรง มักใช้โมดูลโซลิตสเตตรีเลย์สำหรับไฟฟ้ากระแสตรงในการควบคุม โดยการควบคุมจะจ่ายความถี่ PWM ไปที่ด้านอินพุต จากนั้นที่ฝั่งเอาต์พุตจะได้ความถี่ PWM แบบเดียวกัน ทำให้สามารถควบคุมความสว่าง / ความร้อนของอุปกรณ์นั้น ๆ ได้
การควบคุมมอเตอร์
การควบคุมมอเตอร์นิยมใช้งานโมดูลสำเร็จรูปแบบต่าง ๆ ทั้งนี้โมดูลสำเร็จรูปจะต้องเลือกตามกระแสไฟฟ้าที่มอเตอร์ใช้สูงสุด เช่น มอเตอร์ใช้กระแสไฟฟ้าสูงสุดประมาณ 1A ควรจะใช้โมดูลควบคุมมอเตอร์ที่รองรับกระแสไฟฟ้าได้ 2A เป็นต้น
โมดูลควบคุมมอเตอร์ที่นิยมใช้งานจะเป็นโมดูลที่ใช้ไอซี L298N สามารถขับมอเตอร์ที่ใช้กำลังไฟฟ้าสูงสุด 2A ได้ รองรับแรงดันอินพุตสำหรับควบคุมมอเตอร์ตั้งแต่ 5V ถึง 35V รองรับมอเตอร์ได้ 2 ตัว โดยแต่ละตัวมีช่องควบคุมจำนวน 3 ช่อง คือ IN จำนวน 2 ช่องสำหรับควบคุมทิศทางและความเร็วด้วย PWM และช่อง EN สำหรับควบคุมเปิด-ปิดการทำงานทั้งหมด ทั้งนี้ขา EN มักจะมีจั้มเปอร์ต่อกับ +5V อยู่แล้ว จึงไม่จำเป็นต้องนำมาต่อเข้ากับ ESP32 อีก
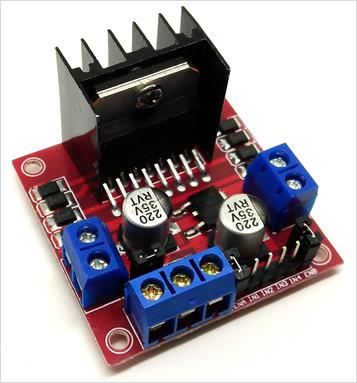
รูปที่ 8.4 โมดูลขับมอเตอร์ใช้ไอซี L298N
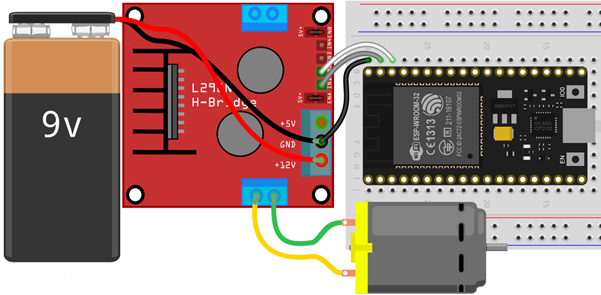
การทดลองใช้งาน ให้ต่อวงจรต่อไปนี้ โดยเปลี่ยนแบตเตอรี่ 9V เป็นแหล่งจ่ายที่ใช้ทดสอบ
ในการเขียนโปรแกรมจะแบ่งการควบคุมออกเป็น 2 ขั้น ดังนี้
- ควบคุมทิศทาง – การที่มอเตอร์จะหมุนได้นั้น จะต้องมีการกำหนดทิศทางการไหลของกระแสไฟฟ้าก่อน โดยจะต้องกำหนดให้เส้นใดเส้นหนึ่งเป็นจ่ายไฟ หรือสถานะ HIGH แล้วให้อีกเส้นเป็นขา GND หรือสถานะ LOW การเปลี่ยนทิศทางการหมุนสามารถทำได้โดยการสลับสถานะกัน เช่น IN1 จ่าย HIGH และ IN2 จ่าย LOW หากต้องการเปลี่ยนทิศทาง ให้สลับสถานะกัน เป็น IN1 จ่าย LOW และ IN2 จ่าย HIGH
- ควบคุมความเร็ว – สามารถทำได้โดยจ่ายสัญญาณ PWM แทนเส้นที่จ่ายเป็น HIGH จากในข้อที่แล้วเลือกใช้เส้น IN1 เป็น HIGH และ IN2 เป็น LOW ก็เปลี่ยน IN1 เป็นจ่าย PWM แทน การควบคุมความเร็วจึงสามารถควบคุมสัญญาณ PWM ได้โดยตรง
แต่สำหรับ ESP32 จะพิเศษที่การควบคุม PWM จะต้องควบคุมผ่าน Timer การเปลี่ยนขาส่งสัญญาณ PWM จึงไม่สามารถทำได้ง่ายนัก ดังนั้นการใช้งานที่ง่ายกว่าคือการใช้ PWM ทั้ง 2 ขา แยก Timer เป็น 2 ตัว
โค้ดโปรแกรมที่ใช้ทดลองจึงสามารถเข้าไปคัดลอกมาอัพโหลดลงบอร์ด NodeMCU-32S ได้ที่ https://goo.gl/CZm1fR
ผลของโค้ดคือมอเตอร์จะหมุนไปในทิศทางหนึ่งในระดับความเร็ว 25% 50% 100% ตามลำดับ แล้วหยุด จากนั้นมอเตอร์หมุนไปอีกทิศทางหนึ่งในระดับความเร็ว 25% 50% 100% ตามลำดับ แล้วหยุดจากนั้นวนลูปไปเรื่อย ๆ ไม่รู้จบ
โค้ดที่ได้ทดลองเมื่อตัดคอมเม้นออก มีดังนี้
บรรทัดที่ 1 กำหนดให้แทนคำว่า IN1 ด้วย 23
บรรทัดที่ 2 กำหนดให้แทนคำว่า IN2 ด้วย 22
บรรทัดที่ 4 สร้างฟังก์ชั่นย่อย setPWM() ใช้สำหรับตั้งค่าสัญญาณ PWM โดยที่ค่าพารามิเตอร์ ch แทนด้วยช่องของ Timer และค่าพารามิเตอร์ duty แทนด้วยค่าดิวตี้ไซเคิลที่อยู่ในช่วง 0% ถึง 100%
บรรทัดที่ 5 ใช้ฟังก์ชั่น map เปลี่ยนค่าในตัวแปร duty จากช่วง 0 ถึง 100 เป็นช่วง 0 ถึง 1023 แล้วนำค่าไปเก็บไว้ในตัวแปร new_duty
บรรทัดที่ 6 ใช้ฟังก์ชั่น ledcWrite() เปลี่ยนค่าดิวตี้ไซเคิลเป็นค่าตามตัวแปร new_duty โดย Timer ตัวที่ต้องการเปลี่ยนอยู่ในตัวแปร ch ที่รับค่าเข้ามาทางพารามิเตอร์
บรรทัดที่ 7 จบคำสั่งในฟังก์ชั่นย่อย setPWM()
บรรทัดที่ 9 สร้างฟังก์ชั่น setup
บรรทัดที่ 10 ใช้ฟังก์ชั่น ledcSetup() เริ่มตั้งค่าใช้งาน PWM โดยใช้ Timer ตัวที่ 0 กำหนดให้ผลิตวามถี่ที่ 500Hz และใช้ความละเอียดแบบ 10 บิต
บรรทัดที่ 11 ใช้ฟังก์ชั่น ledcSetup() เริ่มตั้งค่าใช้งาน PWM โดยใช้ Timer ตัวที่ 1 กำหนดให้ผลิตวามถี่ที่ 500Hz และใช้ความละเอียดแบบ 10 บิต
บรรทัดที่ 12 ใช้ฟังก์ชั่น ledcAttachPin() ผูกขาใน IN1 เข้ากับ Timer ตัวที่ 0
บรรทัดที่ 13 ใช้ฟังก์ชั่น ledcAttachPin() ผูกขาใน IN2 เข้ากับ Timer ตัวที่ 1
บรรทัดที่ 14 จบคำสั่งในฟังก์ชั่น setup
บรรทัดที่ 16 สร้างฟังก์ชั่น loop
บรรทัดที่ 17 เรียกใช้ฟังก์ชั่น setPWM() กำหนดให้ Timer ตัวที่ 0 ที่ผูกอยู่กับขาใน IN1 มีค่าสัญญาณ PWM เป็น 0% หรือเทียบได้กับสถานะ LOW หรือเทียบได้กับการต่อลงกราว์ด
บรรทัดที่ 18 เรียกใช้ฟังก์ชั่น setPWM() กำหนดให้ Timer ตัวที่ 1 ที่ผูกอยู่กับขาใน IN2 มีค่าสัญญาณ PWM เป็น 25%
บรรทัดที่ 19 ด้วยการตั้งค่า PWM ในบรรทัดที่ 17 – 18 ทำให้มอเตอร์เริ่มหมุนไปในทิศทางหนึ่งด้วยความเร็ว 25% แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 23 ด้วยการตั้งค่า PWM ในบรรทัดที่ 21 – 22 ทำให้มอเตอร์หมุนไปในทิศทางหนึ่งด้วยความเร็ว 50% แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 27 ด้วยการตั้งค่า PWM ในบรรทัดที่ 25 – 26 ทำให้มอเตอร์หมุนไปในทิศทางหนึ่งด้วยความเร็ว 100% (ความเร็วเต็มที่) แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 31 ด้วยการตั้งค่า PWM ในบรรทัดที่ 29 – 30 ทำให้มอเตอร์หยุดหมุน เนื่องการตั้งให้ขาใน IN1 และ IN2 มีค่า PWM เป็น 0 ทำให้เทียบได้กับการนำขั้วทั้ง 2 ของมอเตอร์ลงกราว์ดทำให้กระแสไฟฟ้าไม่ไหลผ่าน แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 33 เรียกใช้ฟังก์ชั่น setPWM() กำหนดให้ Timer ตัวที่ 0 ที่ผูกอยู่กับขาใน IN1 มีค่าสัญญาณ PWM เป็น 25%
บรรทัดที่ 34 เรียกใช้ฟังก์ชั่น setPWM() กำหนดให้ Timer ตัวที่ 1 ที่ผูกอยู่กับขาใน IN2 มีค่าสัญญาณ PWM เป็น 0% หรือเทียบได้กับสถานะ LOW หรือเทียบได้กับการต่อลงกราว์ด
บรรทัดที่ 35 ด้วยการตั้งค่า PWM ในบรรทัดที่ 33 – 34 ทำให้มอเตอร์เริ่มหมุนไปในทิศทางตรงกันข้ามกับทิศทางก่อนหน้านี้ด้วยความเร็ว 25% เนื่องจากมีการสลับฝั่งที่จ่ายสัญญาณ PWM แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 39 ด้วยการตั้งค่า PWM ในบรรทัดที่ 37 – 38 ทำให้มอเตอร์หมุนด้วยความเร็ว 50% แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 43 ด้วยการตั้งค่า PWM ในบรรทัดที่ 41 – 42 ทำให้มอเตอร์หมุนด้วยความเร็ว 100% (ความเร็วเต็มที่) แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 47 ด้วยการตั้งค่า PWM ในบรรทัดที่ 45 – 46 ทำให้มอเตอร์หยุดหมุน แล้วหน่วงเวลา 1 วินาทีในบรรทัดนี้ทำให้มอเตอร์ทำงานแบบนี้เป็นเวลา 1 วินาที
บรรทัดที่ 48 จบคำสั่งในฟังก์ชั่น loop
จะเห็นว่าโค้ดตัวอย่างถึงแม้จะมีหลายบรรทัด แต่จะมีการใช้ฟังก์ชั่นซ้ำ ๆ กัน การกำหนดค่าในพารามิเตอร์ของฟังก์ชั่นย่อย setPWM() ทำให้สามารถควบคุมมอเตอร์ได้ทั้งทิศทาง และความเร็ว การใช้งานแบบมอเตอร์ 2 ตัวสามารถทำได้แบบเดียวกันคือการใช้ Timer ตัวที่ 3 และ 4 ในการควบคุมขา IN3 และ IN4 ทั้งนี้ก่อนใช้งานต้องมีการตั้งค่าด้วยฟังก์ชั่น ledcSetup() และ ledcAttachPin() ทุกครั้ง สำหรับรายละเอียดของการสร้างสัญญาณ PWM สามารถย้อนกลับไปอ่านได้ที่หัวข้อ การใช้งาน PWM
การขับอุปกรณ์ใช้ไฟฟ้ากระแสสลับ
ไฟฟ้ากระแสสลับ คือไฟฟ้าที่มีการสลับสับเปลี่ยนขั้วบวกและลบไปมาตลอดเวลา มีการใช้ไฟฟ้ากระแสสลับนี้ในไฟบ้าน โดยอุปกรณ์อิเล็กทรอนิกส์ส่วนใหญ่เมื่อเสียบเข้ากับไฟบ้านที่เป็นไฟฟ้ากระแสสลับแล้วมักจะมีการลดแรงดันลงแล้วแปลงเป็นไฟฟ้ากระแสตรงภายหลัง แต่สำหรับอุปกรณ์บางชื้น เช่น หลอดไฟแบบไส้ เตาปิ้งขนมปัง เตารีด มักจะไม่มีวงจรอิเล็กทรอนิกส์ที่ใช้ไฟฟ้ากระแสตรงภายใน และใช้ไฟฟ้ากระแสสลับโดยตรงในการทำงาน
อุปกรณ์ใช้ไฟฟ้ากระแสสลับมักนิยมใช้งานรีเลย์ในการขับ ทั้งนี้รีเลย์แบบขดลวดที่ใช้ในไฟฟ้ากระแสตรงสามารถนำมาใช้งานในกระแสสลับได้เลย มีการต่อวงจรที่คล้ายกัน มีเพียงการเปลี่ยนแหล่งจ่ายจากไฟฟ้ากระแสตรงเป็นไฟฟ้ากระแสสลับหรือปลั๊กไฟเท่านั้น
การใช้รีเลย์ขับอุปกรณ์ใช้ไฟฟ้ากระแสสลับ
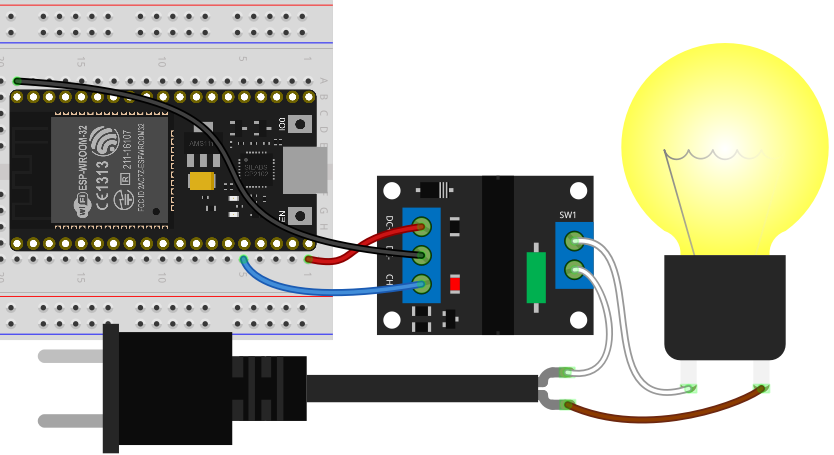
การทดลองต่อไปนี้จะทดลองทำไฟกระพริบโดยใช้หลอดไฟ 220V สามารถต่อวงจรได้ดังนี้
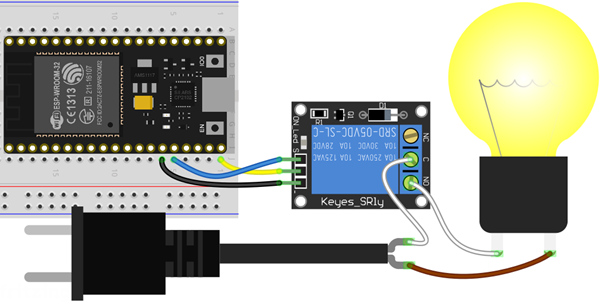
จากนั้น เปิดตัวอย่าง Blink ขึ้นมา แล้วแก้ไชคำว่า LED_BUILTIN เป็น 13 ทั้งหมดในโค้ด (เนื่องจากต่อขาของรีเลย์ไว้ที่ GPIO13) แล้วอัพโหลดลงบอร์ด NodeMCU-32S ได้เลย
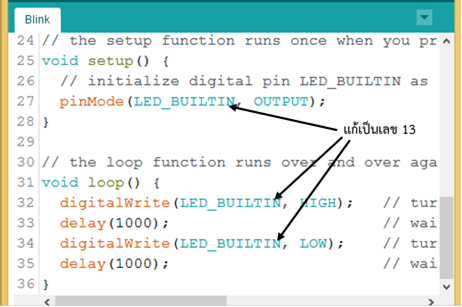
จากนั้น จะได้ยินเสียงรีเลย์ตัดไปมา พร้อมกับหลอดไฟที่กระพริบ ซึ่งโค้ดที่ใช้ทดลองนี้เป็นโค้ดเดียวกับในหัวข้อ เรียนรู้จากตัวอย่างโปรแกรมไฟกระพริบ หากไม่เข้าใจโค้ดส่วนใดสามารถย้อนกลับไปอ่านคำอธิบายได้เลย
การใช้โซลิตสเตตรีเลย์ขับอุปกรณ์ใช้ไฟฟ้ากระแสสลับ
โซลิตสเตตรีเลย์มักนิยใช้ในการขับอุปกรณ์ไฟฟากระแสสลับเช่นเดียวกัน ข้อดีคือมีขนาดเล็ก และไม่ต้องการไฟเลี้ยงรีเลย์ เนื่องจากตัวรีเลย์นั้นทำมาจากไทรแอคซึ่งจะใช้ไฟฟ้ากระแสสลับในการขับตัวเอง ทั้งนี้โซลิตสเตตรีเลย์จะมีความสามารถในการรองรับกระแสไฟฟ้าที่ต่ำกว่ารีเลย์แบบขดลวด หากใช้งานกระแสไฟฟ้าใกล้กับกระแสสูงสุดที่รองรับได้ควรติดแผ่นระบายความร้อนเพิ่มเติม
โซลิตสเตตรีเลย์จะมีทั้งแบบสำเร็จรูป นั่นคือเพียงจ่ายสัญญาณควบคุมเข้าไปก็ใช้งานได้เลย และแบบต่อเอง แบบต่อเองนี้จะใช้ไทรแอคมาต่อเป็นวงจรโซลิตสเตตรีเลย์ซึ่งจะรองรับกระแสไฟฟ้าได้มากกว่า และกรณีต้องการขับอุปกรณ์ใช้กระแสไฟฟ้ามากขึ้น สามารถเปลี่ยนเฉพาะตัวไตรแอดได้เลย
แต่ที่จะมาแนะนำนั้นคือโมดูลโซลิตสเตตรีเลย์สำเร็จรูป รองรับกระแสไฟฟ้าไหลผ่านสูงสุด 2A หรือไม่เกิน 4,400W สามารถใช้งานได้ง่าย แต่ยังจำเป็นต้องใช้ไฟ 5V เลี้ยงอยู่เนื่องจากโซลิตสเตตรีเลย์บนบอร์ดต้องใช้แรงดันไฟฟ้า 5V ในการทำงาน

รูปที่ 8.5 โมดูลโซลิตสเตตรีเลย์ไฟฟ้ากระแสสลับแบบ 1 ช่อง
การใช้โมดูลโซลิตสเตตรีเลย์สามารถต่อวงจรได้ดังนี้
โค้ดโปรแกรมที่ใช้ทดลองสามารถใช้โค้ดเดียวกับหัวข้อที่แล้วได้เลย คือเปิดตัวอย่างโค้ด Blink จากนั้นขาที่ใช้งานเป็นขา 13 แล้วอัพโหลดลงบอร์ด ผลที่ได้คือหลอดไฟกระพริบแต่จะไม่มีเสียงออกมาจากรีเลย์เนื่องจากโซลิตสเตตรีเลย์ใช้การควบคุมการไหลของไฟฟ้าโดยตรง ไม่ใช้หน้าคอนเทคในการควบคุมการไหลของไฟฟ้า
การควบคุมอุปกรณ์ใช้ไฟฟ้ากระแสสลับ
จะแบ่งอุปกรณ์ตามลักษณะการควบคุมแบบเดียวกับการควบคุมอุปกรณ์ใช้ไฟฟ้ากระแสตรง คือ
การควบคุมอุปกรณ์แบบขดลวดความร้อน
การควบคุมแบบนี้จะใช้การควบคุมแบบ 1 ทาง โดยควบคุมเฉพาะการจ่ายกระแสไฟฟ้า ทั้งนี้การควบคุมการจ่ายกระแสไฟฟ้าในระบบไฟฟ้ากระแสสลับจะมีด้วยกันหลายเทคนิค ดังนี้
ควบคุมมุมเฟส – ในไฟฟ้ากระแสสลับจะมีรูปคลื่นของแรงดันไฟฟ้าเป็นรูปคลื่นไซน์ เทคนิคการควบคุมมุมเฟสจะทำการดัดแปลงรูปคลื่นไซน์โดยจะมีส่วนหนึ่งของรูปคลื่นถูกตัดออกไป ทำให้อุปกรณ์ได้รับพลังงานไฟฟ้าไม่เต็มที่แล้วทำให้สามารถควบคุมอุปกรณ์นั้น ๆ ได้ การที่จะดัดแปลงรูปคลื่นไซน์ได้นั้น จะต้องมีการตรวจจับจุดแรงดัน 0V หรือที่เรียกว่า Zero Crossing แล้วหน่วงเวลาเพื่อให้ส่วนหนึ่งของรูปไซน์หายไป แล้วจึงเริ่มให้โซลิตสเตตรีเลย์จ่ายพลังงานไฟฟ้าเพื่อให้อุปกรณ์ที่ต้องการควบคุมได้รับพลังงานไฟฟ้าจากรูปคลื่นที่เหลือ การตัดรูปไซน์ไปในช่วงแรกจึงทำให้อุปกรณ์ได้รับพลังงานไฟฟ้าได้ไม่เต็มที่นั่นเอง
เทคนิคการควบคุมมุมเฟสอาจจะเรียกได้ว่า “เทคนิคการควบคุมไฟฟ้ากระแสสลับแบบธรรมชาติ” เนื่องจากอุปกรณ์ควบคุมความสว่างของหลอดไฟ ควบคุมความเร็วของมอเตอร์ AC ใช้เทคนิคการควบคุมมุมเฟสในการควบคุมอุปกรณ์ใช้ไฟฟ้ากระแสสลับแบบเดียวกัน
เทคนิคการควบคุมมุมเฟสจะต้องอาศัยวงจรอิเล็กทรอนิกส์ถึง 2 วงจร คือวงจรตรวจจับ Zero Crossing และวงจรโซลิตสเตตรีเลย์ แต่บอร์ดสำเร็จรูปที่ผลิตโดย RobotDyn ได้มีวงจรทั้ง 2 วงจรนี้ให้แล้ว ทำให้สามารถนำไปใช้งานได้ง่ายขึ้น
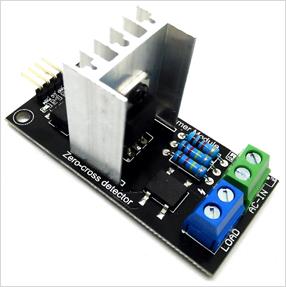
รูปที่ 8.6 โมดูล RobotDyn AC Light Dimmer Module
การใช้งาน สามารถต่อวงจรได้ดังนี้
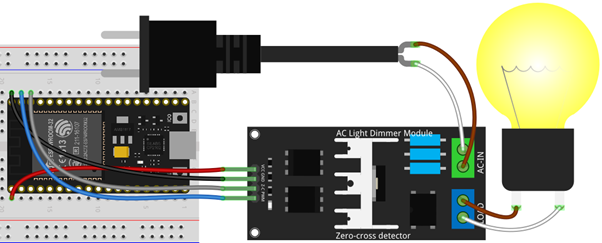
หลังจากต่อวงจรเรียบร้อยแล้ว ขั้นตอนต่อไปคือการอัพโหลดโปรแกรมลงบอร์ด สามารถเข้าไปดาวน์โหลดโค้ดโปรแกรมใช้ทดลองได้ที่ https://goo.gl/TvGnCv จากนั้นนำมาอัพโหลดลงบอร์ด NodeMCU-32S ได้เลย
ผลของโปรแกรมคือหลอดไฟจะค่อย ๆ สว่างขึ้นเรื่อย ๆ จนสว่างสุดแล้วดับ จากนั้นจะสว่างขึ้นเรื่อย ๆ วนไปแบบนี้ไม่สิ้นสุด
สำหรับโค้ดโปรแกรมที่ได้ทดลองไปมีดังนี้ บางส่วนของโค้ดไม่มีในตัวอย่างและจำเป็นต้องอ่านคู่มืออย่างละเอียดเพื่อทำความเข้าใจฟังก์ชั่น แต่เนื่องจากในชุดบทความนี้เน้นเนื้อหาเบื้องต้นเพื่อนำไปใช้งาน โค้ดส่วนนั้นจึงไม่ได้ถูกนำมาอธิบายด้วย
บรรทัดที่ 1 ประกาศให้แทน PWM_PIN ด้วยเลข 23 ใช้กำหนดหมายเลขขา GPIO ที่ต่อกับขา PWM
บรรทัดที่ 2 ประกาศให้แทน Z_C_PIN ด้วยเลข 23 ใช้กำหนดหมายเลขขา GPIO ที่ต่อกับขา Z-C
บรรทัดที่ 4 ประกาศตัวแปร DimmerValue และให้มีค่าเป็น 100
บรรทัดที่ 6 สร้างออปเจค timer แบบพ้อยเตอร์ชนิด hw_timer_t
บรรทัดที่ 8 สร้างฟังก์ชั่นย่อย DimmerSetup()
บรรทัดที่ 9 – 28 คำสั่งต่าง ๆ ในฟังก์ชั่นย่อย ใช้ตั้งค่าให้โมดูลพร้อมใช้งาน
บรรทัดที่ 29 จบคำสั่งในฟังก์ชั่นย่อย DimmerSetup()
บรรทัดที่ 31 สร้างฟังก์ชั่น setup
บรรทัดที่ 32 เรียกใช้ฟังก์ชั่นย่อย DimmerSetup() เพื่อตั้งค่าต่าง ๆ ให้พร้อมใช้งานกับ RobotDyn AC Light Dimmer Module
บรรทัดที่ 33 จบคำสั่งในฟังก์ชั่น setup
บรรทัดที่ 35 สร้างฟังก์ชั่น loop
บรรทัดที่ 36 ใช้ Ternary Operators ตรวจสอบตัวแปร DimmerValue ว่าเป็น 0 หรือไม่ หากใช้ ส่งกลับค่า 100 แต่หากไม่ ส่งกลับค่า DimmerValue – 1 แล้วนำค่าที่ส่งกลับไปใส่ลงตัวแปร DimmerValue
บรรทัดที่ 37 หน่วงเวลา 10 มิลิวินาที หรือ 0.01 วินาที
บรรทัดที่ 38 จบคำสั่งในฟังก์ชั่น setup
ในการนำไปใช้งานจริงขอแค่มีส่วนหัว พร้อมเรียกฟังก์ชั่นย่อย DimmerSetup() ในฟังก์ชั่น setup ก็สามารถใช้งานได้แล้ว โดยการใช้งานเพียงกำหนดค่าที่ต้องการลงในตัวแปร DimmerValue ได้เลย หากค่า 100 หลอดไฟจะดับ และค่า 0 หลอดไฟจะติดสว่างสุด ทั้งนี้ค่าที่ตั้งในตัวแปร DimmerValue ต้องกำหนดค่าหลังเรียกใช้ฟังก์ชั่นย่อย DimmerSetup() แล้วเท่านั้น
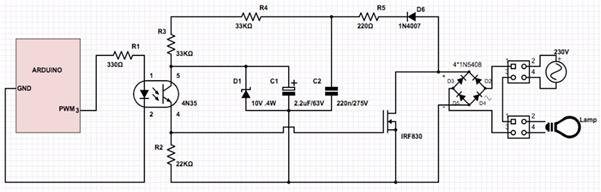
ตัดแบ่งลูกคลื่น – คือการใช้สัญญาณ PWM ไปตัดแบ่งลูกคลื่นโดยตรง วิธีนี้จำเป็นต้องใช้ความถี่ PWM อย่างน้อย 10 เท่าของความความถี่ลูกคลื่น นั่นคือการใช้งานความถี่ตั้งแต่ประมาณ 500Hz ขึ้นไป สำหรับ ESP32 ที่สามารถใช้ความถี่ PWM ได้ในระดับ 100kHz จึงไม่มีปัญหาต่อการใช้งาน แต่การใช้เทคนิคนี้จะต้องต่อวงจรอิเล็กทรอนิกส์เอง เพราะไม่มีโมดูลสำเร็จรูปออกมาจำหน่ายในขณะนี้
สำหรับวงจรสามารถดูได้ดังนี้ สังเกตว่าวงจรมีหลักการง่าย ๆ คือใช้มอเฟสในการช๊อตวงจรเพื่อให้กระแสไฟฟ้าส่วนใหญ่ไปตกอยู่ที่หลอดไฟ แล้วทำให้หลอดไฟสว่างขึ้นมา
การควบคุมอุปกรณ์แบบมอเตอร์
การควบคุมแบบมอเตอร์จะเป็นการควบคุมแบบ 2 ทาง คือควบคุมทิศทาง และควบคุมความเร็ว สำหรับมอเตอร์ไฟฟ้ากระแสสลับแต่ละตัวจะมีวงจรที่ใช้ควบคุมไม่เหมือนกัน การควบคุมเบื้องต้นคือหาวิธีควบคุมทิศทางก่อน จากนั้นจึงใช้วงจรแบบในหัวข้อที่ผ่านมาในการควบคุมความเร็วให้ได้ตามที่ต้องการ ทั้งนี้ควรคำนึงถึงกระแสไฟฟ้าที่ต้องการใช้เนื่องจากโซลิตสเตตรีเลย์ส่วนใหญ่รองรับกระแสไฟฟ้าไม่มาก ควรเลือกใช้โซลิตสเตตรีเลย์ที่รองรับกระแสไฟฟ้าได้เพียงพอสำหรับมอเตอร์
สรุปท้ายบท
บทนี้เป็นการกล่าวถึงการควบคุมอุปกรณ์ต่าง ๆ โดยแยกหัวข้อเป็นอุปกรณ์ที่ใช้ไฟฟ้ากระแสตรงแรงดันต่ำ และอุปกรณ์ที่ใช้ไฟฟ้ากระแสสลับแรงดันสูง การควบคุมอุปกรณ์แต่ละตัวจะแตกต่างกันไป โดยส่วนใหญ่แล้วจะนิยมใช้งานโมดูลรีเลย์สำเร็จรูปเพื่อขับอุปกรณ์เหล่านั้น โดยข้อมูลในบทนี้จะปูพื้นฐานไปสู่การเขียนโปรแกรมเพื่อควบคุมอุปกรณ์ต่าง ๆ ต่อไป ผู้เขียนแนะนำให้ศึกษาข้อมูลของอุปกรณ์แต่ละตัวก่อนใช้งานทุกครั้ง และการทำงานกับไฟบ้าน หรือไฟฟ้ากระแสสลับมีอันตรายมาก ผู้อ่านควรตั้งสติก่อนทดลองทุกครั้ง

 ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266




TOP เลื่อนขึ้นบนสุด
