
เริ่มต้นใช้งาน Raspberry Pi Camera Module 3 แสดงภาพ บันทึกภาพ บันทึกวีดีโอ และใช้ OpenCV ทำกล้อง AI เบื้องต้น
บอร์ด Raspberry Pi มาพร้อมกับช่องเชื่อมต่อกล้องแบบ CSI (Camera Serial Interface) ที่รองรับความเร็วสูงถึง 1 Gbps สำหรับ Raspberry Pi 5 รองรับการเชื่อมต่อกล้อง 2 ตัว ความละเอียดสูงสุด 12 ล้านพิกเซล กล้อง Raspberry Pi นิยมใช้ในงานหลากหลาย ไม่ว่าจะเป็นกล้องวงจรปิด (Security Camera) กล้องถ่ายภาพแบบ Time-lapse งาน Computer Vision เช่น การตรวจจับใบหน้า การนับวัตถุ หุ่นยนต์อัตโนมัติ และโปรเจค IoT ที่ต้องการประมวลผลภาพแบบ Real-time ด้วยราคาที่สูงและความยืดหยุ่นสูง จึงเป็นตัวเลือกยอดนิยมสำหรับผู้สนใจพัฒนาโปรเจคที่เกี่ยวข้องกับการประมวลผลภาพ (Image Processing)
ในบทความนี้จะแนะนำการเริ่มต้นใช้งาน Raspberry Pi Camera Module 3 ตั้งแต่การติดตั้ง การตั้งค่าเบื้องต้น การแสดงภาพสดผ่านหน้าจอ การถ่ายภาพนิ่ง และการบันทึกวิดีโอด้วยคำสั่งง่าย ๆ พร้อมทั้งแนะนำการใช้ไลบรารี OpenCV ในการประมวลผลภาพขั้นพื้นฐาน เช่น การย่อรูป การวาดเส้น การใส่ข้อความ รวมไปถึงการสร้างกล้อง AI ที่สามารถจำแนกวัตถุแบบ Real-time ด้วยการผสานการทำงานของ OpenCV กับโมเดล Deep Learning ที่มีชื่อว่า MobileNet ตรวจจับและจำแนกวัตถุได้หลากหลายแบบเรียลไทม์ เหมาะสำหรับผู้ที่ต้องการก้าวเข้าสู่โลกของ AI และ Computer Vision อย่างแท้จริง

รู้จัก Raspberry Pi Camera Module 3
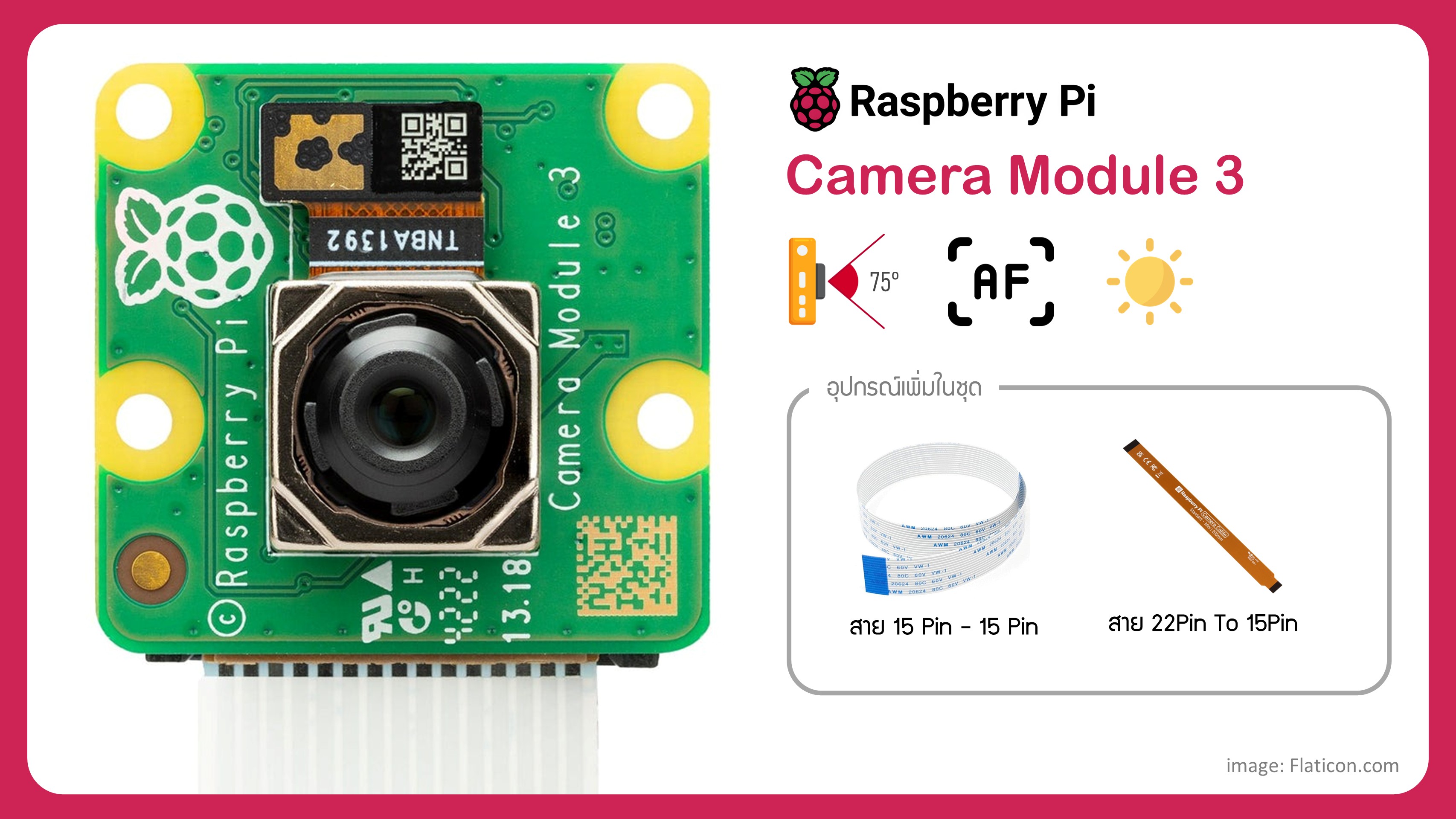
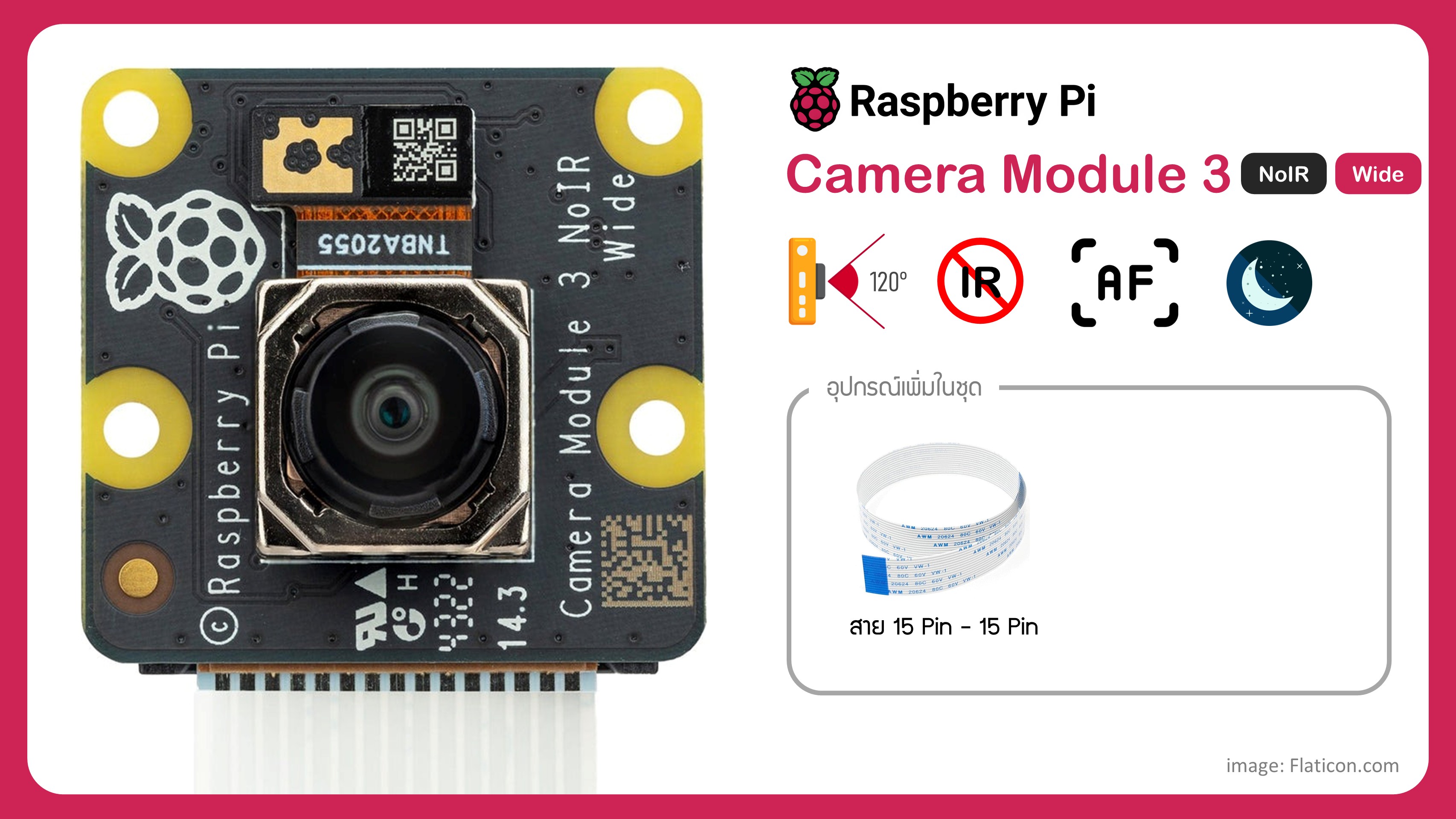
Raspberry Pi Camera Module 3 เป็นกล้องรุ่นล่าสุดที่ออกแบบมาเพื่อใช้งานร่วมกับ Raspberry Pi โดยเฉพาะ ใช้เซ็นเซอร์ Sony IMX708 ความละเอียด 12 MP มุมมอง 75 องศา พร้อมระบบโฟกัสอัตโนมัติแบบ Phase Detection Autofocus (PDA) ทำงานได้รวดเร็วและแม่นยำ มาพร้อมกับเทคโนโลยี HDR (High Dynamic Range) ที่ช่วยเพิ่มคุณภาพของภาพถ่ายและวิดีโอในสภาวะแสงที่หลากหลาย รวมถึงการปรับปรุงความไวแสงในสภาวะแสงน้อยให้ดีขึ้นกว่ารุ่นเดิม สามารถถ่ายวิดีโอ Full HD ที่ 50 เฟรมต่อวินาที และรองรับเฟรมเรตที่สูงขึ้นเมื่อลดความละเอียด มีทั้งหมด 4 รุ่นให้เลือกใช้
รุ่นธรรมดา (Raspberry Pi Camera Module 3)
ความสามารถพื้นฐาน ถ่ายภาพมุมมอง 75 องศา เหมาะสำหรับสภาพแวดล้อมที่มีแสงเพียงพอ ในกล้องมาพร้อมสายที่ใช้งานกับ Raspberry Pi 5
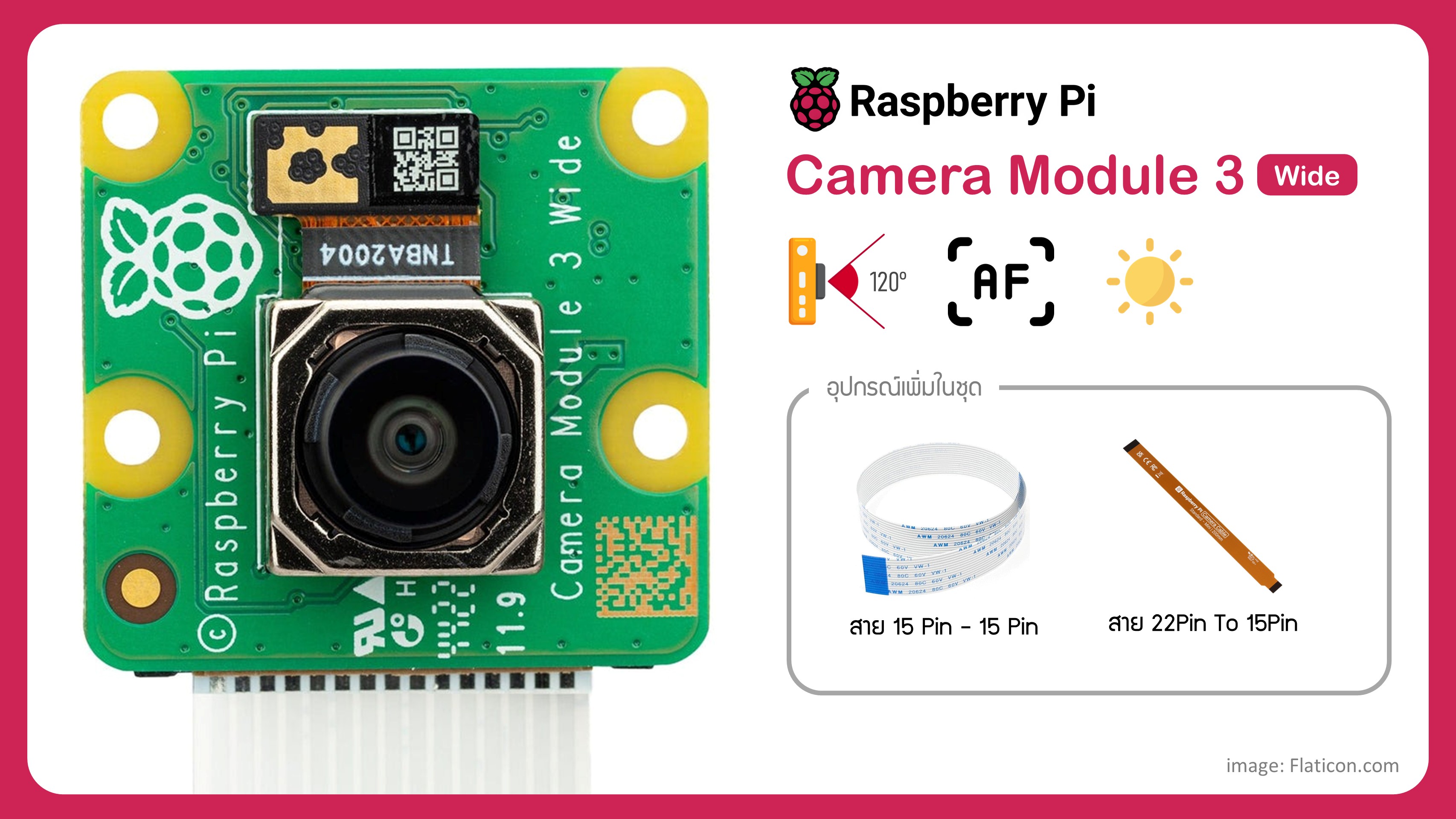
รุ่นมุมกว้าง (Raspberry Pi Camera Module 3 Wide)
ถ่ายภาพมุมมอง 120 องศา เหมาะสำหรับงานที่ต้องการภาพมุมกว้าง เช่น กล้องวงจรปิด, งาน Computer Vision ที่ต้องการตรวจนับ เช่น ตรวจนับรถยนต์บนถนน, ตรวจนับจำนวนคน เป็นต้น การถ่ายภาพในที่มืดต้องใช้แสงที่มองเห็นได้เพิ่มเติม ในกล้องมาพร้อมสายที่ใช้งานกับ Raspberry Pi 5
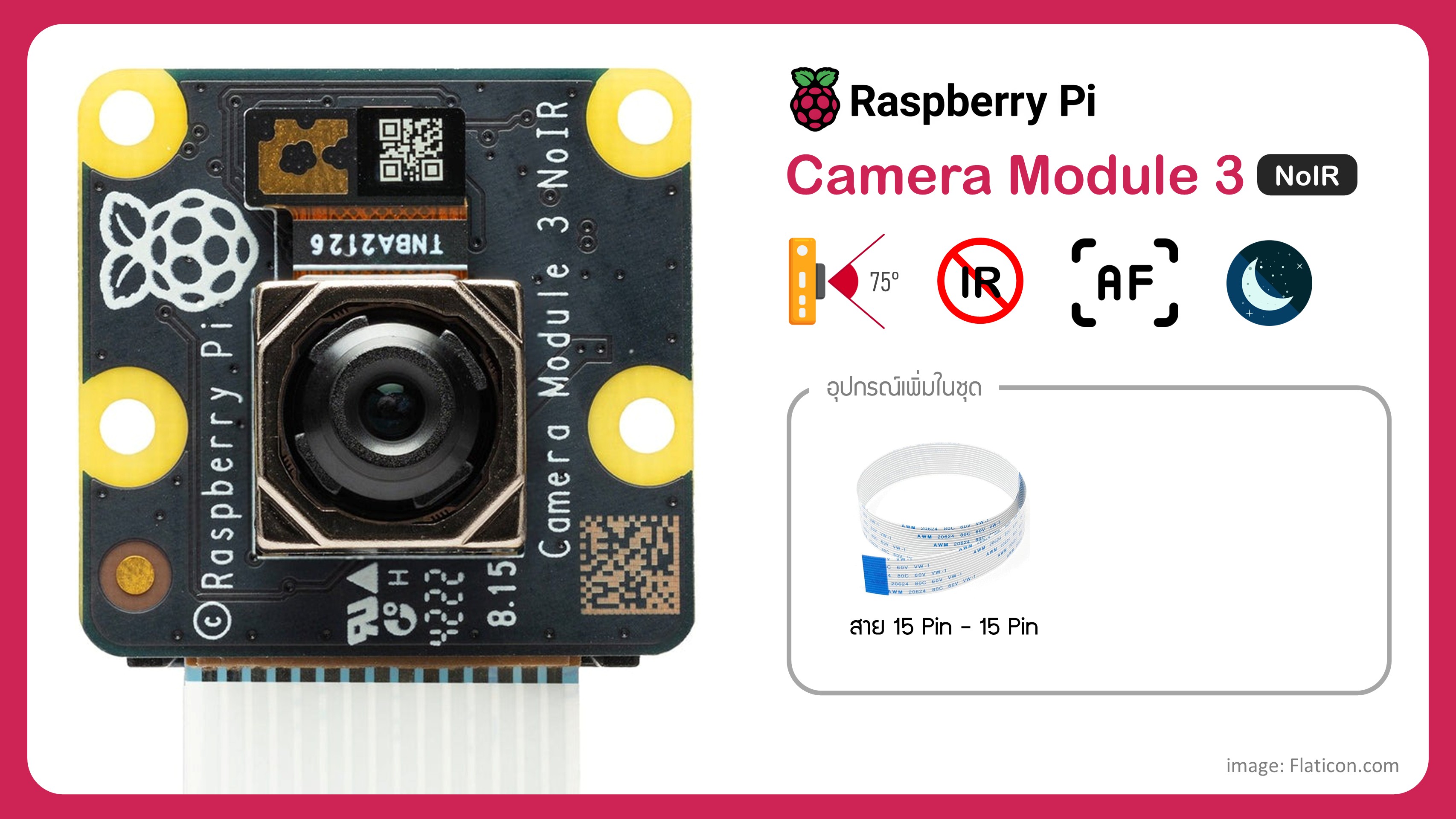
รุ่นถ่ายภาพในที่มืด (Raspberry Pi Camera Module 3 NoIR)
ด้วยการตัดเลนส์กรองแสงอินฟาเรดออกไป ทำให้กล้องสามารถถ่ายในที่มืดได้อย่างชัดเจน เหมาะสำหรับงานที่เน้นถ่ายภาพในที่มืด โดยใช้แหล่งแสงอินฟาเรดเพิ่มเติม มุมมองภาพ 75 องศา ในกล้องไม่มีสายที่ใช้กับ Raspberry Pi 5 มาให้ (ต้องซื้อเพิ่ม)
รุ่นมุมกว้าง ถ่ายภาพในที่มืด (Raspberry Pi Camera Module 3 Wide NoIR)
ถ่ายภาพมุมมอง 120 องศา และตัดเลนส์กรองแสงอินฟาเรด เหมาะสำหรับงานที่ต้องการภาพมุมกว้างในที่มืด ในกล้องไม่มีสายที่ใช้กับ Raspberry Pi 5 มาให้ (ต้องซื้อเพิ่ม)
การต่อ Camera Module 3 เข้ากับ Raspberry Pi 5
การเชื่อมต่อกล้องกับ Raspberry Pi 5 ใช้สายแถบแบบพิเศษ (FPC Cable) ที่มาพร้อมกับกล้อง โดยสายต่อกล้องมี 2 รูปแบบ คือสายแบบ 15 Pin - 15 Pin และสายแบบ 22Pin To 15Pin สำหรับการต่อกับ Raspberry Pi 5 จะใช้สายแบบ 22Pin To 15Pin และ Raspberry Pi รุ่นเก่ากว่าจะใช้สายแบบ 15 Pin - 15 Pin
หมายเหตุ. กล้องรุ่น NoIR และ Wide NoIR จะไม่มีสายแบบ 22Pin To 15Pin แถมมาให้ ต้องซื้อเพิ่มเติม
รอใส่รูป
ขั้นตอนการต่อกล้องเข้ากับบอร์ด Raspberry Pi 5
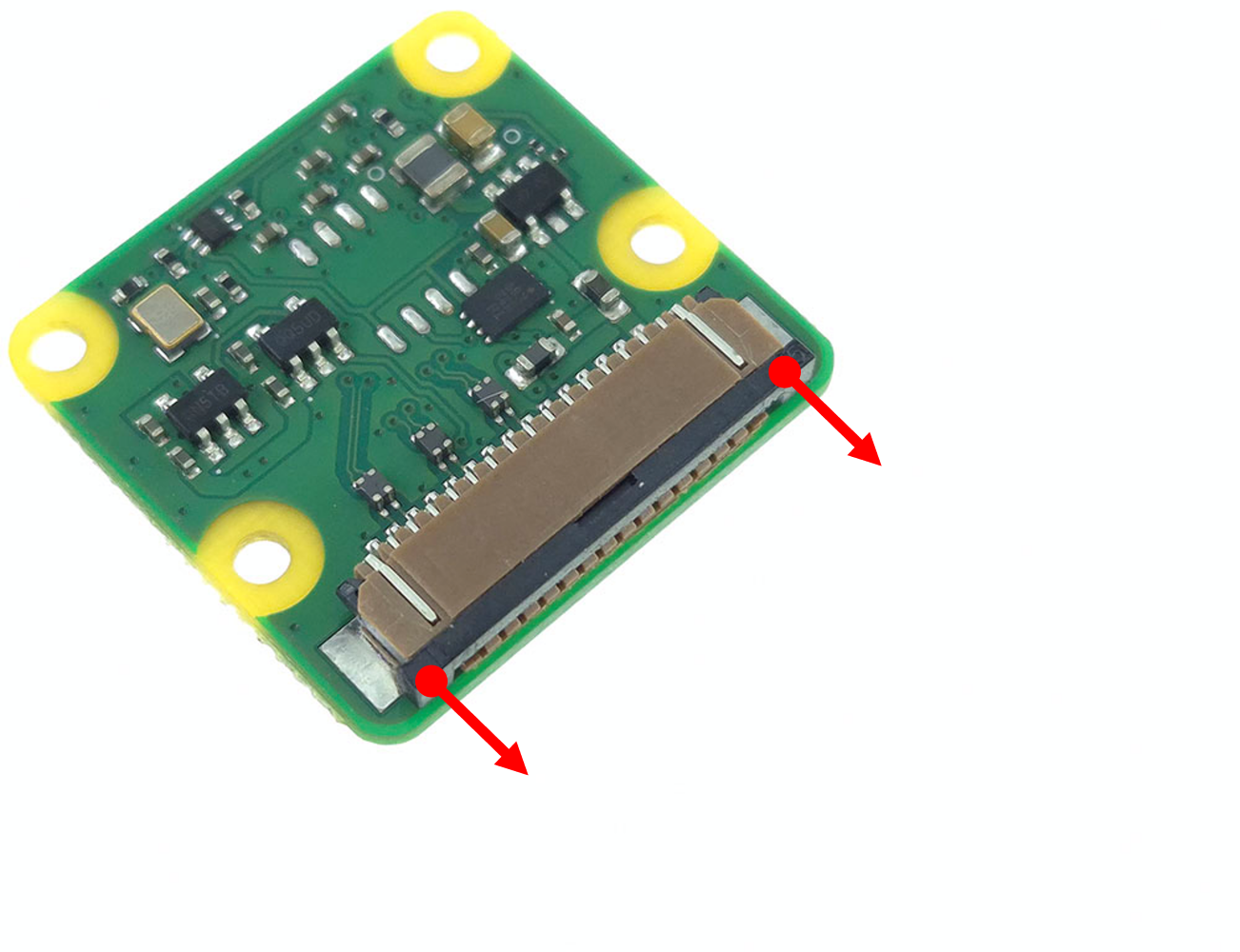
ที่ตัวกล้อง พลิกด้านหลัง ดึงแถบล็อกพลาสติกออกมา
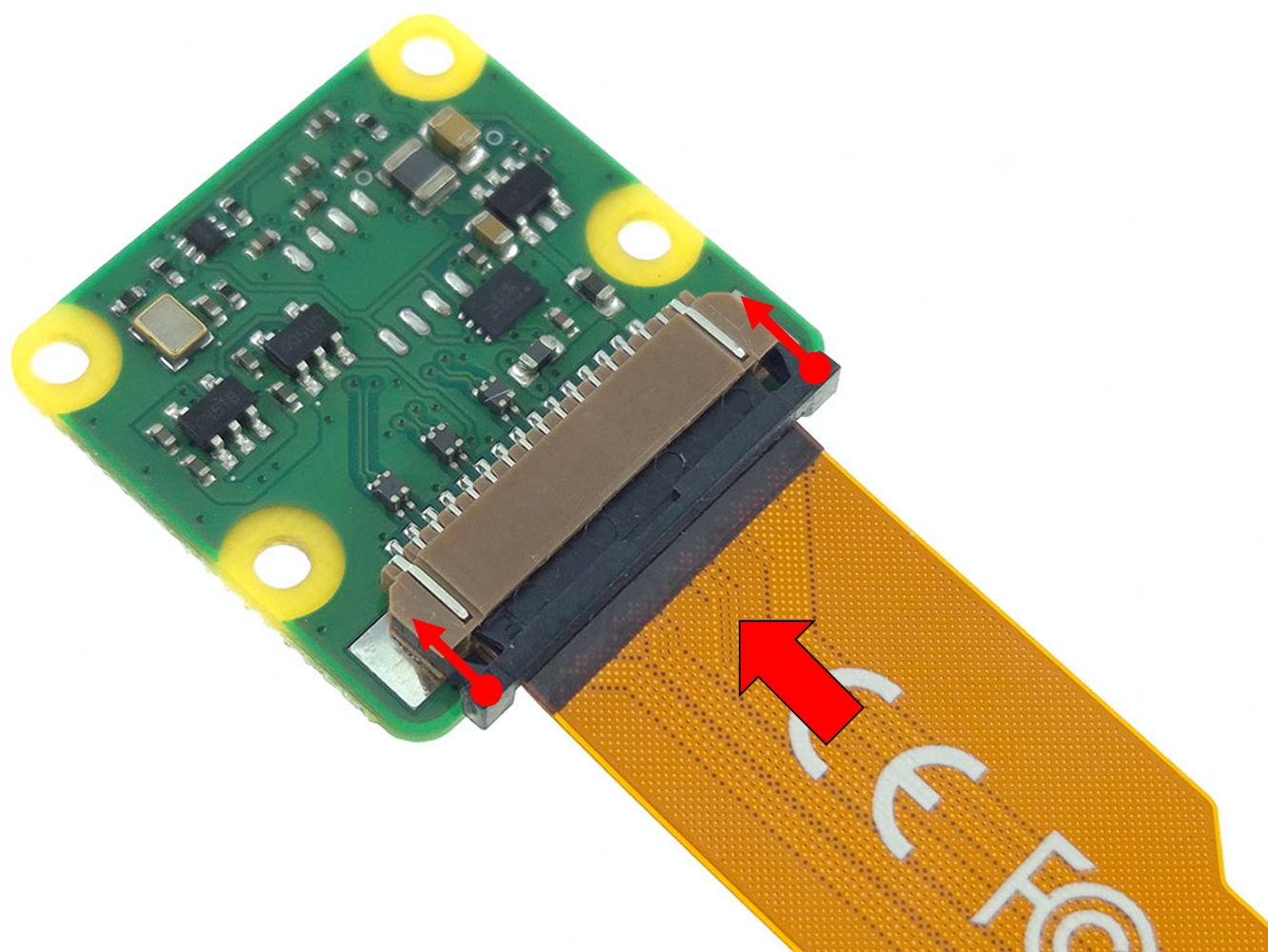
ใส่สายแบบ 22Pin To 15Pin ด้านใหญ่เข้าไป โดยให้แถบขั้วทองแดงหันลงด้านล่าง แล้วดันแถบล็อกพลาสติกเข้าไป
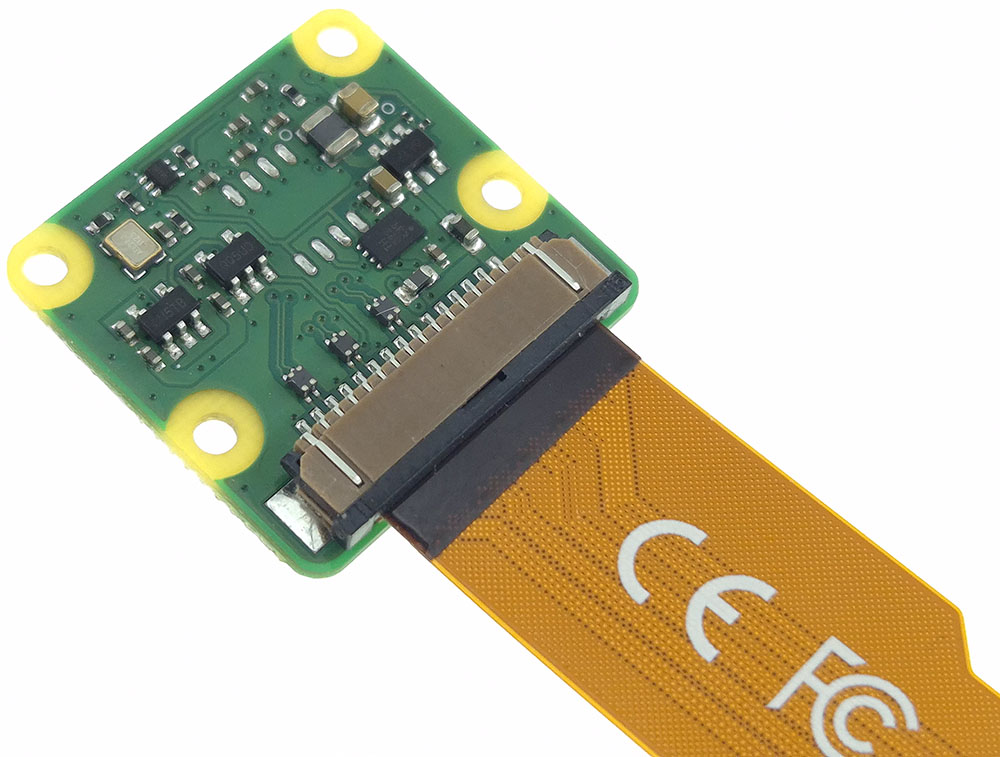
ได้กล้องที่ต่อสาย ดังรูป
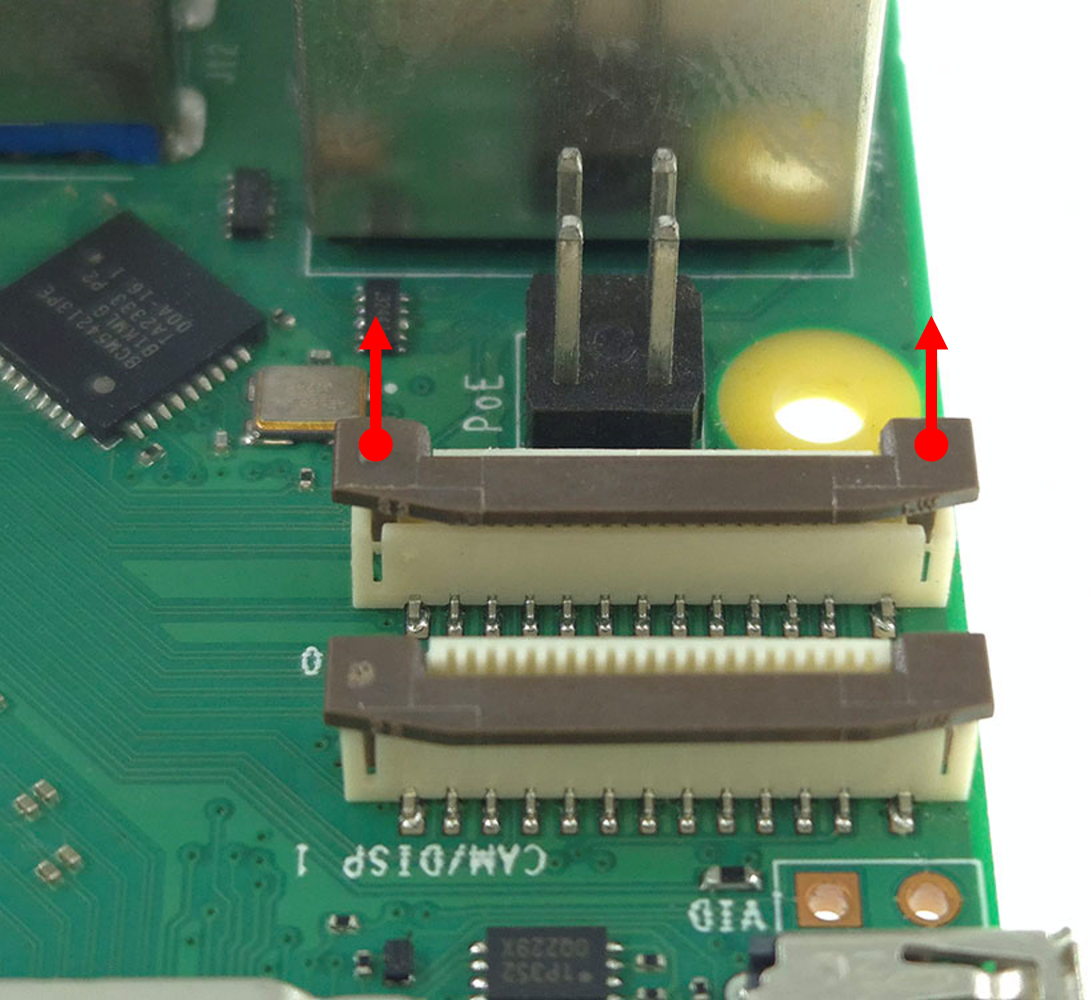
ที่บอร์ด Raspberry Pi ให้ปิดบอร์ดก่อน ตรงช่องเสียบ CAM0/DISP0 ให้ดึงแถบล็อกพลาสติกขึ้นมา
ใส่สายด้านเล็กเข้าไป แล้วกดล็อกแถบล็อกพลาสติก
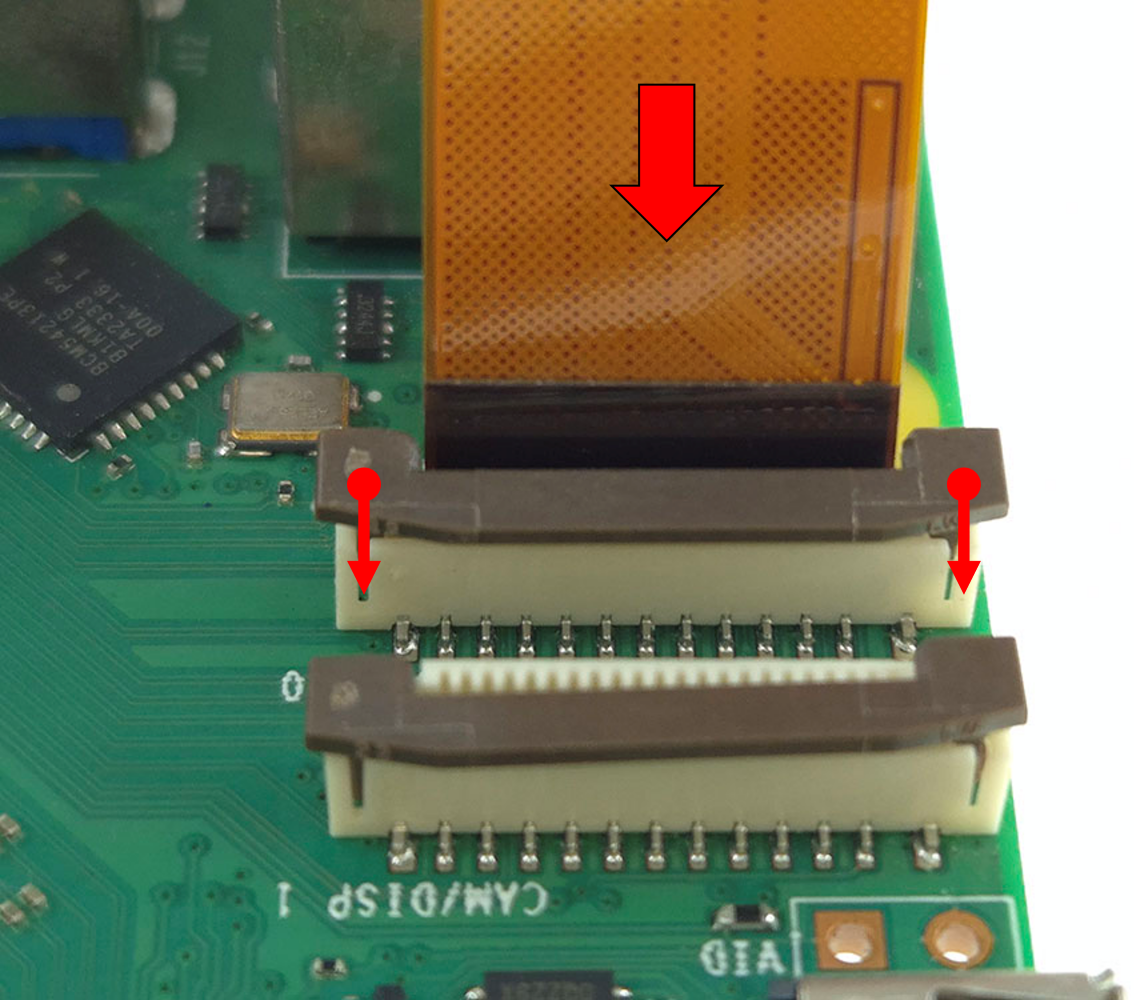
ได้สายที่ต่อเข้าบอร์ดสมบูรณ์ดังรูป

ได้กล้องที่ต่อเข้าบอร์ด Raspberry Pi 5 (ดังรูป)

หมายเหตุ: Raspberry Pi 5 รองรับการต่อกล้องได้ถึง 2 ตัวพร้อมกัน หากต้องการต่อเพิ่ม ให้ทำขั้นตอนเดียวกัน แต่เปลี่ยนช่องเป็น CAM1/DISP1 แทน
ทดสอบกล้อง Camera Module 3
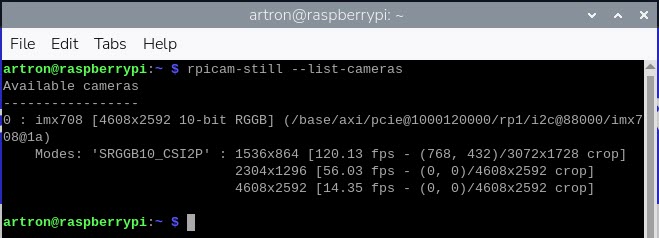
หลังจากต่อกล้องเรียบร้อยแล้ว ให้จ่ายไฟบอร์ด Raspberry Pi แล้วรอจนกว่าจะบูตเสร็จ เปิด Terminal ขึ้นมา ใช้คำสั่งดังนี้
rpicam-still --list-cameras
หากเชื่อมต่อสำเร็จ รุ่นของกล้องจะแสดงขึ้นมา (ดังรูป)
ทดสอบแสดงภาพจากกล้อง
พิมพ์คำสั่งใน Terminal ดังนี้
rpicam-hello --timeout 0
ภาพจากกล้องจะแสดงขึ้นมาแล้ว
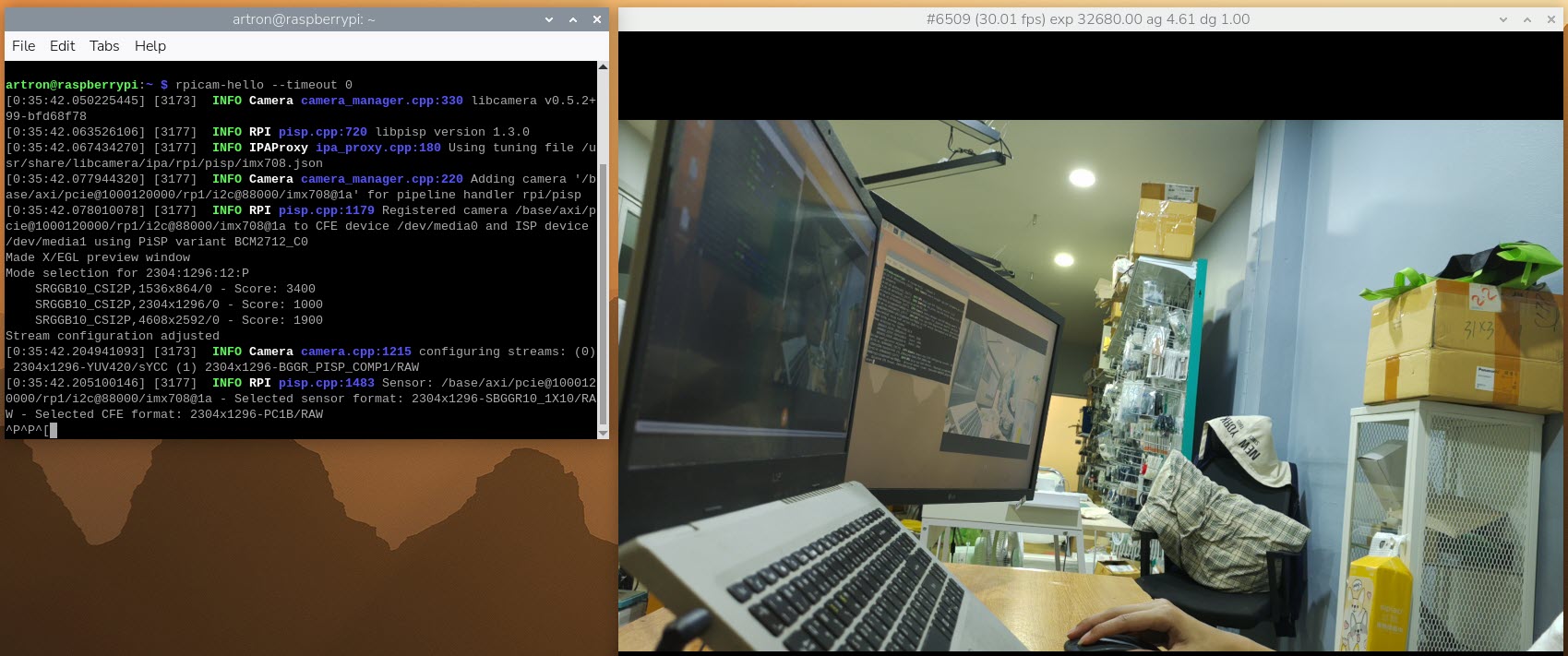
หมายเหตุ. พารามิเตอร์ --timeout 0 หมายถึงแสดงภาพแบบไม่จำกัดเวลา กล้องจะแสดงภาพต่อเนื่องจนกว่าจะกด Ctrl+C เพื่อหยุด คำสั่งนี้เหมาะสำหรับการทดสอบดูภาพจากกล้องและจัดตำแหน่งกล้อง
การบันทึกภาพจากกล้อง
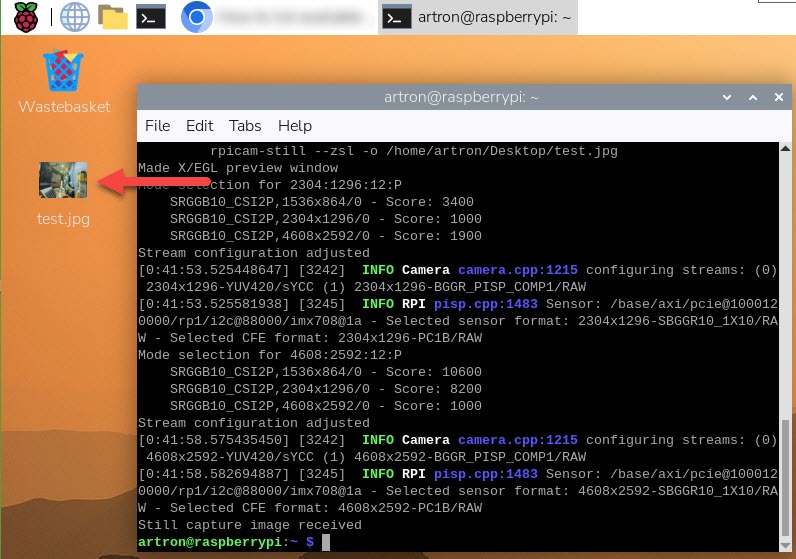
ใช้คำสั่ง rpicam-jpeg เพื่อบันทึกภาพในรูปแบบ JPEG ตัวอย่างให้บันทึกภาพชื่อ test.jpg ไว้ที่หน้า Desktop ดังนี้
rpicam-jpeg --output ~/Desktop/test.jpgหลังส่งคำสั่งใน Terminal ภาพที่บันทึกจะแสดงขึ้นมาในหน้า Desktop (ดับเบิลคลิกเปิดไฟล์เพื่อดูรูป)
สามารถกำหนดขนาดภาพและระยะเวลาหน่วงก่อนถ่ายภาพได้
rpicam-jpeg --output ~/Desktop/test.jpg --timeout 2000 --width 640 --height 480
พารามิเตอร์ที่ใช้:
--timeout 2000รอ 2 วินาที (2000 มิลลิวินาที) ก่อนถ่ายภาพ--width 640กำหนดความกว้าง 640 พิกเซล--height 480กำหนดความสูง 480 พิกเซล
Camera Module 3 รองรับความละเอียดสูงสุดถึง 4608 × 2592 พิกเซล (12MP)
หากต้องการบันทึกเป็นไฟล์ PNG หรือรูปแบบอื่นๆ ให้ใช้คำสั่ง rpicam-still พร้อมระบุชนิดไฟล์ ตัวอย่างบันทึกเป็น PNG
rpicam-still --encoding png --output ~/Desktop/test.png
รูปแบบ encoding ที่รองรับ:
- jpg หรือ jpeg - รูปแบบมาตรฐาน มีการบีบอัด
- png - รูปแบบที่ไม่สูญเสียคุณภาพ
- bmp - Bitmap แบบไม่บีบอัด
- rgb - ข้อมูล RGB แบบ raw
- yuv420 - รูปแบบ YUV
การบันทึกวีดีโอ
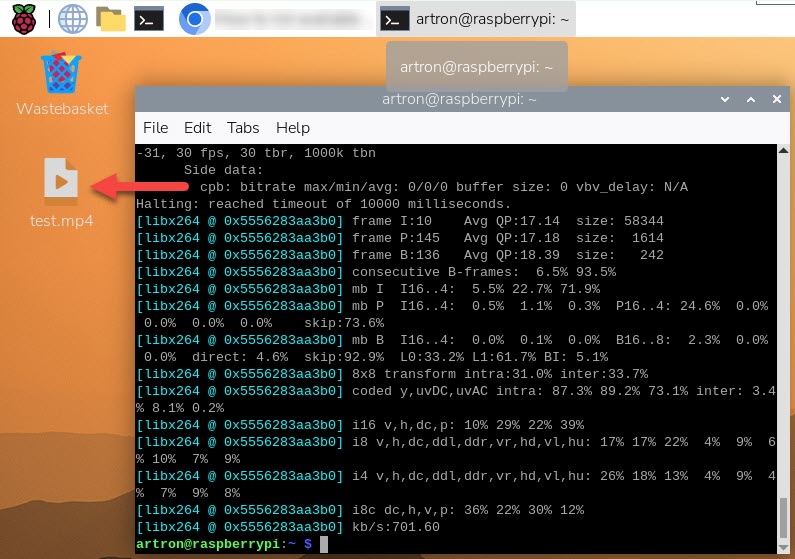
Camera Module 3 สามารถบันทึกวีดีโอได้โดยใช้คำสั่ง rpicam-vid ตัวอย่างบันทึกเป็น mp4 ที่หน้า Desktop เป็นเวลา 10 วินาที
rpicam-vid -t 10s -o ~/Desktop/test.mp4
พารามิเตอร์:
- -t 10s กำหนดระยะเวลาบันทึก 10 วินาที
- -o ~/Desktop/test.mp4 ระบุชื่อไฟล์และตำแหน่งที่จะบันทึก
ผลที่ได้ ไฟล์วีดีโอจะแสดงขึ้นมาบนหน้า Desktop (ดับเบิลคลิกเปิดไฟล์เพื่อวีดีโอ)
สามารถกำหนดพารามิเตอร์เพิ่มเติมได้ เช่น
--widthและ--heightกำหนดความละเอียดวีดีโอ--framerateกำหนดเฟรมเรตของวีดีโอ (FPS)
rpicam-vid -t 10s -o ~/Desktop/test.mp4 --width 1920 --height 1080 --framerate 30
การใช้งานร่วมกับ OpenCV เบื้องต้น
OpenCV หรือ Open Source Computer Vision Library คือไลบรารีโอเพนซอร์สขนาดใหญ่ที่พัฒนาโดย Intel สำหรับใช้ในการประมวลผลภาพ (Image Processing) และการมองเห็นด้วยคอมพิวเตอร์ (Computer Vision) ซึ่งได้รับความนิยมอย่างกว้างขวางทั้งในวงการวิจัย วิศวกรรม และอุตสาหกรรม เช่น ในงานด้านหุ่นยนต์ ยานยนต์ และระบบรักษาความปลอดภัย ไลบรารีนี้รองรับภาษาต่าง ๆ เช่น Python, C++ และ Java ใช้งานได้ง่าย เหมาะกับทั้งมือใหม่และผู้เชี่ยวชาญ มีความสามารถหลากหลายตั้งแต่การอ่าน/เขียนภาพ การแปลงสี การกรองสีในภาพ ไปจนถึงการตรวจจับวัตถุและใช้ร่วมกับโมเดล AI แบบ Deep Learning เนื่องจากเป็นโอเพนซอร์สจึงมีชุมชนนักพัฒนาและเอกสารจำนวนมาก สามารถเรียนรู้และต่อยอดได้อย่างรวดเร็วและมีประสิทธิภาพ
การเขียนโปรแกรมสั่งงาน Camera Module 3 ด้วย Python ต้องติดตั้งไลบรารี่ควบคุมกล้องอย่าง picamera2 และ OpenCV ดังนี้
sudo apt update
sudo apt install -y python3-picamera2 python3-opencv
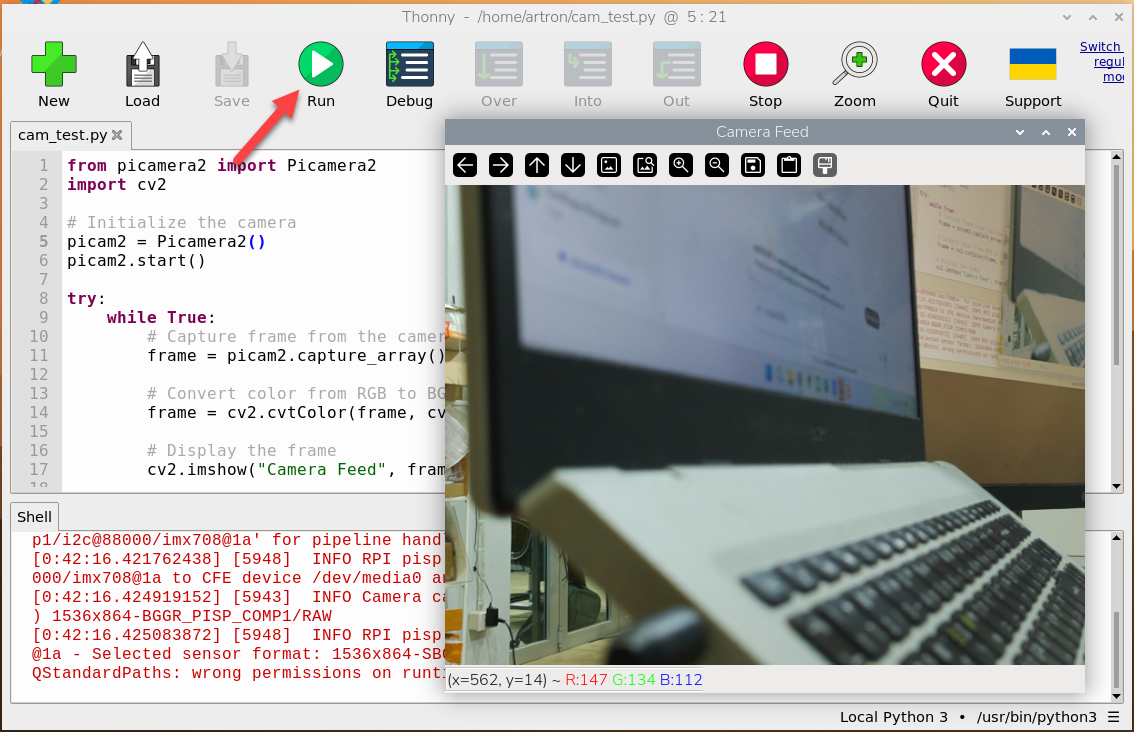
ทดสอบแสดงภาพจากกล้องด้วย OpenCV
เปิดโปรแกรม Thonny ขึ้นมา
คัดลอกโค้ดต่อไปนี้ใส่ในโปรแกรม
จากนั้นกด Run ผลที่ได้ภาพจากกล้องจะแสดงขึ้นมาแล้ว
การเปิดใช้งาน Auto Focus
Camera Module 3 มาพร้อมระบบ Auto Focus รองรับ 3 โหมด ดังนี้
AfMode: 0- Manual (ปิด Auto Focus)AfMode: 1- Auto (โฟกัสครั้งเดียว)AfMode: 2- Continuous (โฟกัสอย่างต่อเนื่อง)
เปิดใช้งาน/เปลี่ยนโหมดโดยใช้คำสั่ง
picam2.set_controls({"AfMode": <โหมด Auto Focus 0-2>, "AfTrigger": 0})
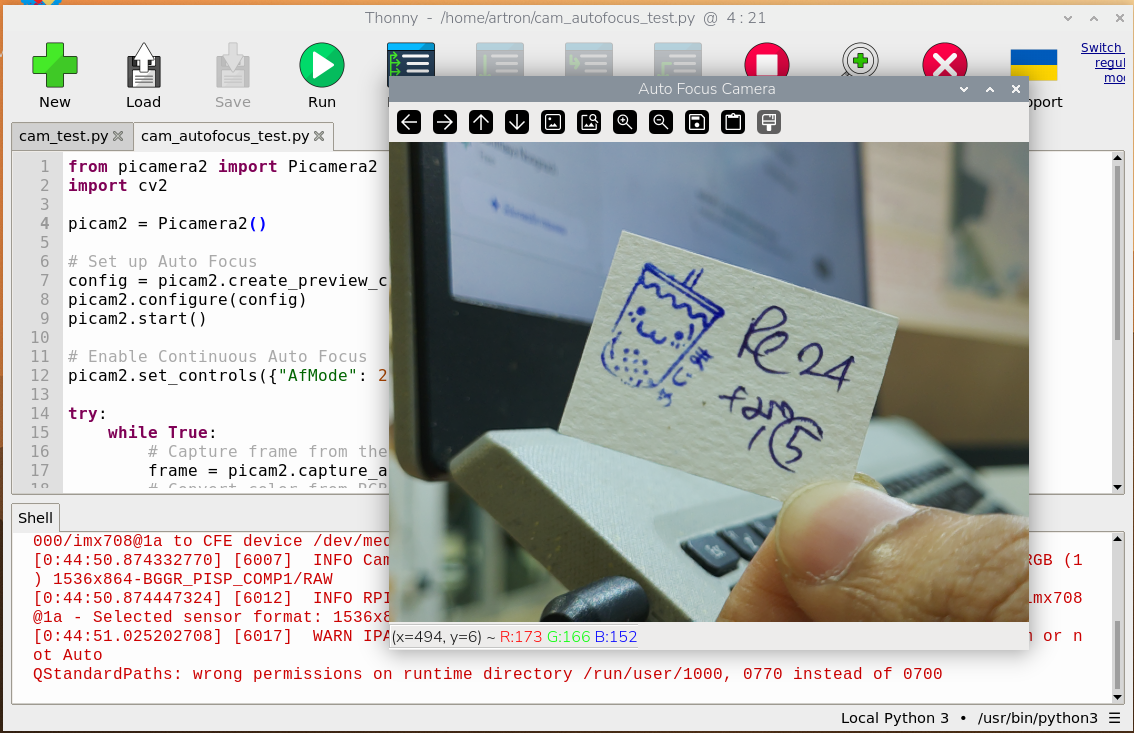
ตัวอย่างโค้ดโปรแกรมแสดงภาพจากกล้องแบบเปิด Auto Focus อย่างต่อเนื่อง (Continuous) มีดังนี้
ผลที่ได้ เมื่อนำวัตถุมาใกล้ หรือออกห่าง กล้องจะปรับความชัดให้อัตโนมัติแล้ว
การปรับแต่งรูปภาพด้วย OpenCV เบื้องต้น
ภาพที่ได้จากกล้องมักมีขนาดใหญ่ เมื่อนำไปเข้าโมเดล AI จะทำให้การประมวลผลช้าลง หากต้องการให้การประมวผลเร็วขึ้นจำเป็นต้องลดขนาดของภาพลง การลดขนาดภาพใช้คำสั่ง cv2.resize() โดยลดขนาดภาพได้ 2 รูปแบบคือ
1) ลดขนาดแบบกำหนดขนาดใหม่ - ใส่ขนาดใหม่ลงในพารามิเตอร์ที่ 2 ตัวอย่างกำหนดขนาดใหม่เป็น 620x480 มีดังนี้
frame_resized = cv2.resize(frame, (620, 480))
2) ลดขนาดแบบกำหนด % - ใช้กรณีต้องการลดขนาดแบบรวดเร็ว กำหนดขนาดที่ต้องการลด 0 - 1 ในพารามิเตอร์ fx และ fy ตัวอย่างลดขนาด 50% มีดังนี้
frame_resized = cv2.resize(frame, None, fx=0.5, fy=0.5)
การวาดกรอบสี่เหลี่ยมในภาพ ทำได้โดยใช้คำสั่ง cv2.rectangle() โดยกำหนดพิกัดเริ่มวาดในพารามิเตอร์ที่ 2, กำหนดพิกัดสิ้นสุดในพารามิเตอร์ที่ 3, กำหนดสี BGR ในพารามิเตอร์ที่ 4, กำหนดความหนาของเส้นขอบในพารามิเตอร์ที่ 5
ตัวอย่างการวาดสี่เหลี่ยมที่พิกัด (50, 50) สิ้นสุดที่ (150, 100) สีแดง (0, 0, 255) ความหนาของเส้นขอบ 2 px
cv2.rectangle(frame, (50, 50), (150, 100), (0, 0, 255), 2)
การใส่ข้อความในรูปในคำสั่ง cv2.putText() โดยกำหนดข้อความที่พารามิเตอร์ 2, กำหนดพิกัดเริ่มต้นพารามิเตอร์ 3, กำหนดฟอนต์ในพารามิเตอร์ 4, กำนหนดขนาดตัวอักฤษในพารามิเตอร์ 5, กำหนดสี BGR ในพารามิเตอร์ 6 และกำหนดขอบตัวอักษรในพารามิเตอร์ 7
ตัวอย่างโค้ดแสดงข้อความ Hello, OpenCV ! ที่พิกัดเริ่ม (10, 30) ฟอนต์ Hershey Simplex ขนาดตัวอักษร 0.5 สีเขียว (0, 255, 0) ขอบหนา 1 px มีดังนี้
cv2.putText(frame_resized, "Hello, OpenCV !", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)
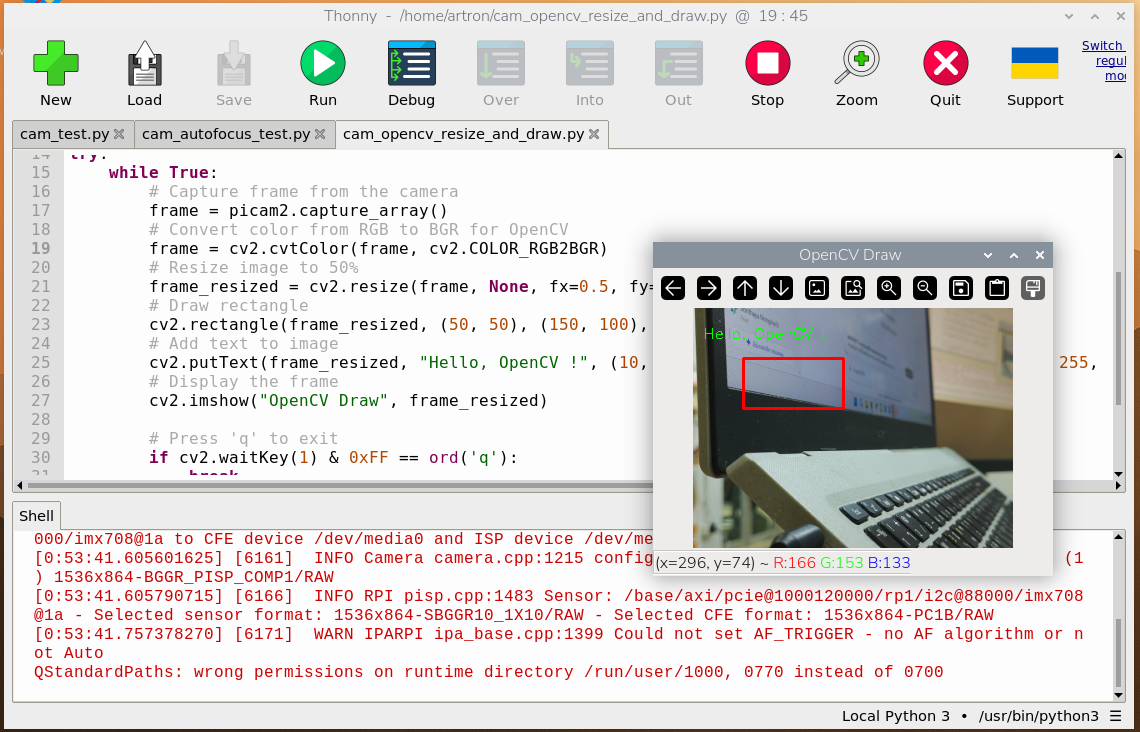
นำคำสั่งทั้งหมดมารวมกัน ได้โค้ดทดสอบดังนี้
กด Run ผลที่ได้แสดงดังรูป
สร้างกล้อง AI ด้วยโมเดล MobileNet-SSD v1
MobileNet-SSD v1 คือโมเดลการตรวจจับวัตถุ (Object Detection) ที่เบาและเร็ว ผสานสถาปัตยกรรม MobileNet กับ SSD (Single Shot MultiBox Detector) เพื่อให้สามารถทำงานได้อย่างมีประสิทธิภาพบนอุปกรณ์ทรัพยากรจำกัด โดยเฉพาะในระบบ Embedded ต่าง ๆ MobileNet ใช้เทคนิค Depthwise Separable Convolution ช่วยลดจำนวนพารามิเตอร์และการคำนวณ ทำให้โมเดลมีขนาดเล็กและทำงานได้เร็ว ส่วน SSD เป็นเฟรมเวิร์กที่สามารถตรวจจับวัตถุด้วยการประมวลผลเพียงรอบเดียว (single shot) ทำให้มีความเร็วสูงกว่าวิธีแบบดั้งเดิมอย่าง R-CNN
การใช้งานโมเดล MobileNet-SSD v1 ต้องดาวน์โหลดไฟล์ด้วยคำสั่ง wget ใน Terminal ดังนี้
wget https://dl.artronshop.co.th/OpenCV/ssd_mobilenet_v1_coco_2017_11_17/frozen_inference_graph.pb
wget https://dl.artronshop.co.th/OpenCV/ssd_mobilenet_v1_coco_2017_11_17/ssd_mobilenet_v1_coco_2017_11_17.pbtxt
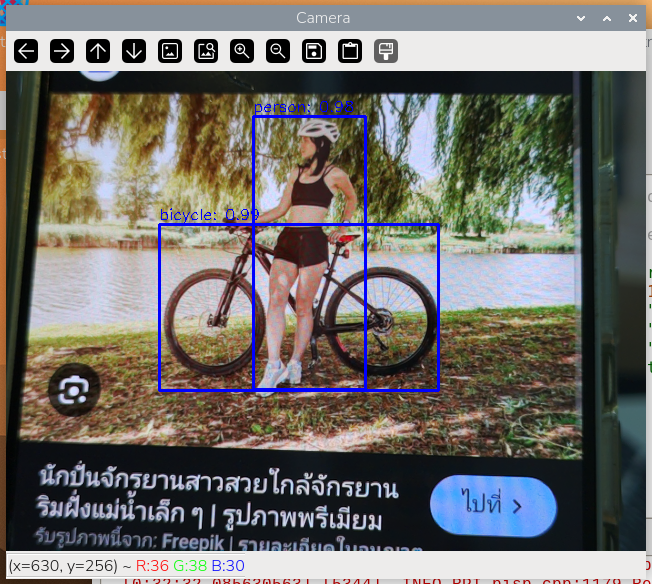
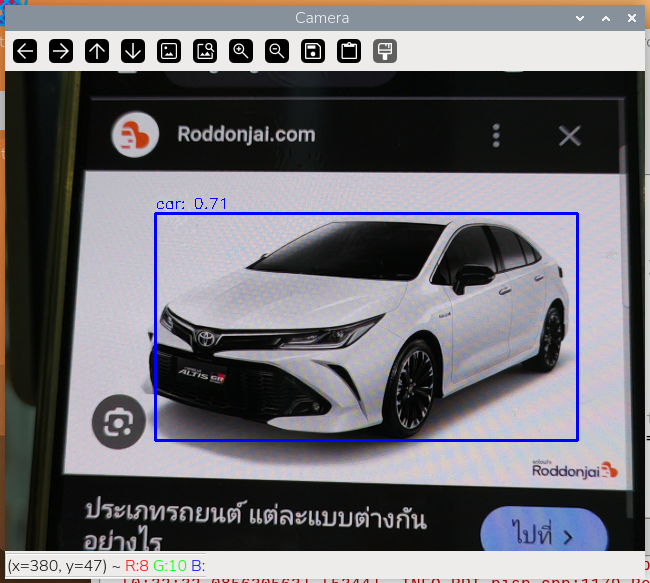
เขียนโค้ดโปรแกรมดังนี้
กด Run ผลที่ได้ โปรแกรมจะเริ่มตรวจจับวัตถุแบบเรียลไทม์และแสดงกรอบพร้อมชื่อวัตถุที่ตรวจพบ รวมถึงค่าความเชื่อมั่น (confidence) 0 - 1
สรุป
Raspberry Pi Camera Module 3 เป็นกล้องสำหรับบอร์ด Raspberry Pi ที่มีความสามารถสูงและใช้งานง่าย เพียงต่อสายก็สามารถใช้งานได้เลย มีไลบรารี่ เอกสาร และโค้ดโปรแกรมให้ทดลองใช้งานมาให้ครบ เหมาะสำหรับโปรเจกต์ที่หลากหลาย ตั้งแต่การบันทึกภาพและวีดีโอธรรมดา ไปจนถึงการประมวลผลภาพและ AI ขั้นสูง
Raspberry Pi Camera Module 3 ยังต่อยอดใช้งานได้หลากหลายมาก ในโอกาศหน้าจะนำเสนอต่อไป สำหรับบทความนี้
~สวัสดีครับ~
ข้อมูลเขียนบรรณานุกรม


 ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266




TOP เลื่อนขึ้นบนสุด
