
ESP32 เบื้องต้น :: บทที่ 3 พื้นฐานอุปกรณ์และวงจรดิจิตอล

ชุดบทความนี้นอกจากจะสอนใช้งาน ESP32 แล้ว ยังจะปูพื้นฐานทางด้านอิเล็กทรอนิกส์ด้วย เพราะการเรียนรู้เกี่ยวกับระบบสมองกลฝังตัว จำเป็นต้องใช้ความรู้ทางด้านฮาร์ดแวร์ และซอฟแวร์ควบคู่กันไป จึงจะทำให้ได้ผลลัพธ์ที่ถูกต้องตามความต้องการ
พื้นฐานอิเล็กทรอนิกส์
อิเล็กทรอนิกส์ หมายถึง การควบคุมไฟฟ้า ให้อุปกรณ์ต่าง ๆ ทำงานได้ตามที่ต้องการ โดยใช้วงจรไฟฟ้า การที่อุปกรณ์อิเล็กทรอนิกส์จะทำงานได้นั้น จะเกี่ยวข้องกับการไหลของกระแสไฟฟ้า โดยไฟฟ้าจะไหลก็ต่อเมื่อมีความต่างศักดิ์เกิดขึ้น หรือมีแรงดันไฟฟ้าไม่เท่ากันในแต่ละจุด ทำให้กระแสไฟฟ้าไหลจากที่แรงดันสูง ไปหาที่แรงดันต่ำ
พื้นฐานของไฟฟ้า จะมีค่าอยู่ 3 ค่า ที่ถือเป็นพื้นฐานของอิเล็กทรอนิกส์ทั้งหมด นั่นคือ แรงดันไฟฟ้า : E (มีหน่วยเป็นโวล์ : V) กระแสไฟฟ้า : I (มีหน่วยเป็น แอมป์ : A) และค่าความต้านทาน : R (มีหน่วยเป็นโอห์ม : Ω) ซึ่งค่าทั้ง 3 ค่านี้ มีความสัมพันธ์ตามกฎของโอห์ม
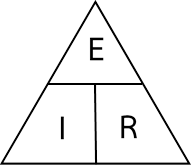
จากรูปสามเหลี่ยมกฎของโอห์ม หากต้องการหาตัวใด ให้ปิดตัวนั้น เช่น ต้องการหาค่าแรงดันไฟฟ้าจากกระแสไฟฟ้าและค่าความต้านทาน เมื่อนำมือมาปิดที่ตัว E จะพบว่า I และ R อยู่ใกล้กัน หมายถึง E = I * R หรือหากต้องการหาค่าความต้านทาน จากแรงดันไฟฟ้า และกระแสไฟฟ้า ปิดที่ตัว R พบว่า E และ I อยู่คนละระดับกัน หมายถึง R = E / I นอกจากนี้ I = E / R อีกด้วย
อุปกรณ์อิเล็กทรอนิกส์
ในชุดบทความนี้ จะยกมาเฉพาะอุปกรณ์อิเล็กทรอนิกส์ที่นิยมใช้ในการเรียนรู้ระบบสมองกลฝังตัว หากท่านผู้อ่านมีความสนใจในอุปกรณ์อิเล็กทรอนิกส์ ท่านสามารถศึกษาด้วยตนเองได้ โดยผู้เขียนแนะนำให้ใช้หนังสือเกี่ยวกับอิเล็กทรอนิกส์พื้นฐาน ซึ่งจะมีตั้งแต่ แนะนำอุปกรณ์ สัญลักษณ์ต่าง ๆ การตรวจเช็ค และการทำแผ่นวงจรพิมพ์ (PCB)
โพรโทบอร์ด (Protoboard)

รูปที่ 3.1 โพรโต้บอร์ด (Protoboard) หรือเบรดบอร์ด (Breadboard)
โพรโทบอร์ด (Protoboard) หรืออาจจะเรียกทับศัพท์ว่า เบรดบอร์ด (Breadboard) สำหรับในประเทศไทยมักจะนิยมใช้คำว่า โพรโทบอร์ด หรือบางครั้งเพี้ยนเป็นคำว่า โฟโต้บอร์ด แต่หากนำคำว่า โฟโต้บอร์ด ไปค้นหาในเว็บต่างประเทศ จะไม่พบข้อมูลใด ๆ เลย เนื่องจากมีเพียงประเทศไทยประเทศเดียวที่ใช้คำว่า โฟโต้บอร์ด ส่วนคำว่า โพรโทบอร์ด เป็นคำที่หลาย ๆ ประเทศนิยมใช้ แต่หากจะให้เป็นสากล เรียกว่า เบ-รดบอร์ด จะทำให้เข้าใจตรงกันได้ทุกชาติ
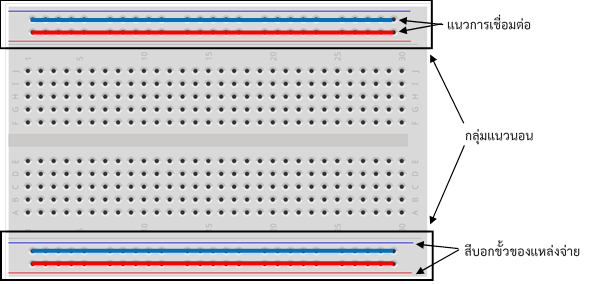
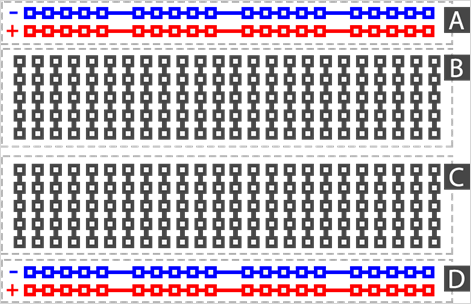
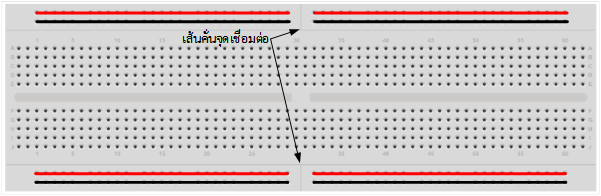
โพรโทบอร์ด เป็นอุปกรณ์ที่จะช่วยให้สามารถเชื่อมต่อวงจรเพื่อทดลองง่ายขึ้น ลักษณะของบอร์ดจะเป็นพลาสติกมีรูจำนวนมาก ภายใต้รูเหล่านั้นจะมีการเชื่อมต่อถึงกันอย่างมีรูปแบบ เมื่อนำอุปกรณ์อิเล็กทรอนิกส์มาเสียบ จะทำให้พลังงานไฟฟ้าสามารถไหลจากอุปกรณ์หนึ่ง ไปยังอุปกรณ์หนึ่งได้ ผ่านรูที่มีการเชื่อมต่อกันด้านล่าง พื้นที่การเชื่อมต่อกันของโพรโทบอร์ด จะแบ่งได้เป็น 2 กลุ่มใหญ่ คือ
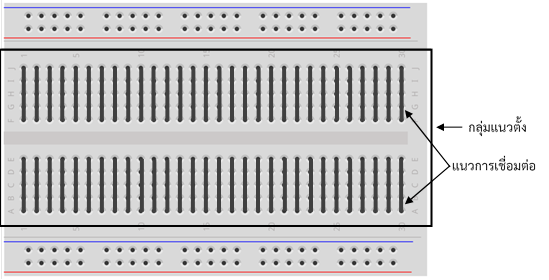
- กลุ่มแนวตั้ง เป็นกลุ่มที่เป็นพื้นที่สำหรับการเชื่อมต่อวงจร วางอุปกรณ์ จะมีช่องเว้นกลางกลุ่มสำหรับเสียบไอซีตัวถังแบบ DIP และบ่งบอกการแบ่งเขตเชื่อมต่อ
- กลุ่มแนวนอน เป็นกลุ่มที่มีการเชื่อมต่อกันในแนวนอน ใช้สำหรับพักไฟที่มาจากแหล่งจ่าย เพื่อใช้สำหรับเชื่อมต่อไฟจากแหล่งจ่ายเลี้ยงให้วงจรต่อไป และจะมีสี สัญลักษณ์สกรีนเพื่อบอกขั้วที่ของแหล่งจ่ายที่ควรนำมาพักไว้ โดยสีแดง จะหมายถึงขั้วบวก และสีดำ หรือสีน้ำเงิน จะหมายถึงขั้วลบ
ขนาดของโพรโทบอร์ด นิยมบอกเป็นจำนวนจุดที่มีบนโพรโทบอร์ด เช่น โพรโต้บอร์ดขนาด 400 จุด โพรโต้บอร์ดขนาด 830 จุด เป็นต้น
การใช้งานโพรโทบอร์ดนั้น จำเป็นจะต้องรู้วงจรที่จะต่อเสียก่อน จึงจะเริ่มนำอุปกรณ์วางลงบนโพรโทบอร์ดได้ ทั้งนี้การใช้โพรโทบอร์ดเพื่อทดลองวงจร สามารถทำได้หลายรูปแบบ ตัวอย่างดังรูปด้านล่างนี้ เป็นวงจรขับหลอด LED

ซึ่งจะสามารถนำวงจรไปต่อลงโพรโทบอร์ดได้หลายรูปแบบ ดังตัวอย่างต่อไปนี้
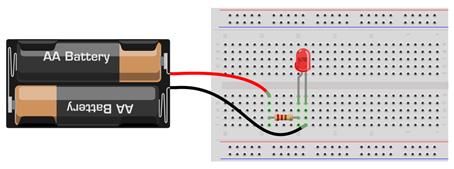
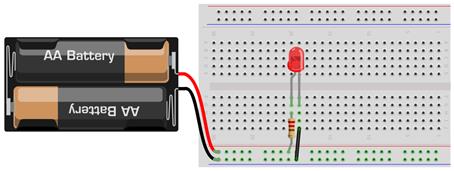

การวางอุปกรณ์บนโพรโทบอร์ดที่ดี ควรคำนึงถึงความง่ายในการดูเป็นหลัก เช่น การวางตัวต้านทาน ให้วางตามแนวการอ่านค่าแถบสี คือวางแถบสีแรกไว้ทางซ้าย การวางตัวเก็บประจุ ควรวางให้หันหน้าออกจากบอร์ด และไม่ควรมีอุปกรณ์อื่นบังการมองค่า นอกจากนี้ สายที่ใช้เชื่อมต่อระหว่างจุด ไม่ควรยาวเกินไป ไม่คดงอ สายตัวนำไม่ควรยาวเกินไป เนื่องจากสานที่ยาวเกินไปจะทำให้เสียบได้ไม่สนิท และอาจจะทำให้เกิดการลัดวงจรกันระหว่างแนวการเชื่อมต่อได้ ควรใช้สีของสายจั้มให้เหมาะสม เช่น สายไฟเลี้ยงบวก ใช้สีแดง สายไฟเลี้ยงลบ ใส่สีดำ เป็นต้น
สำหรับโพรโต้บอร์ดขนาด 830 จุด จะมีข้อควรระวังในกลุ่มการเชื่อมต่อแนวนอน เนื่องจากโพรโต้บอร์ดบางรุ่นจะมีการแบ่งช่องกลางจุดเชื่อมต่อแนวนอน ผู้เขียนแนะนำให้ใช้มัลติมิเตอร์ในการทดสอบก่อนใช้งาน
ตัวต้านทาน (Resistor)

รูปที่ 3.2 ตัวต้านขนาด 1/4W
ตัวต้านทาน (Resistor) เป็นอุปกรณ์อิเล็กทรอนิกส์ที่ไม่มีขั้ว ทำหน้าที่ต้านการไหลของกระแสไฟฟ้าในวงจร มักจะใช้งานกับอุปกรณ์ที่ต้องจำกัดกระแสไฟฟ้าในการใช้งาน เช่น หลอด LED จะทำงานได้เต็มที่ ๆ กระแสไฟฟ้าประมาณ 15mA หากน้อยกว่า จะทำงานไม่เต็มที่ หากมากกว่า จะทำให้หลอดขาด นอกจากนี้ หากนำตัวต้านทานมาต่อเป็นวงจรรูปแบบต่าง ๆ ก็จะอาจจะใช้เพื่อจุดประสงค์อื่นนอกจากการจำกัดกระแส เช่น การใช้ตัวต้านทานต่อเป็นวงจรแบ่งแรงดัน เป็นต้น
ตัวต้านทาน จะเรียกความสามารถในการต้านทานกระแสไฟฟ้าว่า “ค่าความต้านทาน” มีหน่วยเป็น โอห์ม (สัญลักษณ์ : Ω) ซึ่งสาเหตุที่เรียกว่า “โอห์ม” นั้นมาจากชื่อของผู้คิดค้น ยอร์จ ซี่มอน โอห์ม นั่นเอง นอกจากนี้ตัวต้านทานยังมีตัวบอกค่าความผิดพลาดที่เกิดขึ้นได้ โดยจะระบุเป็นร้อยละ (หรือเปอร์เซ็นต์) เช่น ค่าความผิดพลาด ±5% หากตัวต้านทานมีค่า 100kΩ จะหมายความว่า ค่าความต้านทานที่สามารถวัดได้นั้นจะอยู่ในช่วง 95kΩ ถึง 105kΩ นั่นเอง
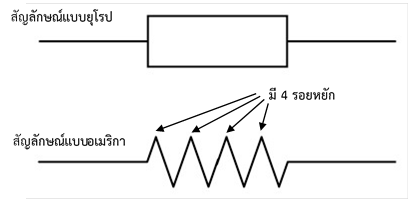
รูปที่ 3.3 สัญลักษณ์ของตัวต้านทานในวงจรไฟฟ้า
สำหรับในบทถัด ๆ ไปในชุดบทความนี้ จะใช้ตัวต้านทานที่เป็นแบบ Through Hole หรือตัวต้านทานแบบมีขา จึงจะไม่กล่าวถึงตัวต้านทานแบบ SMD
ตัวต้านทานแบบ Through Hole จะมีด้วยกันหลายขนาด ซึ่งขนาดจะขึ้นอยู่กับค่ากำลังไฟฟ้าที่สามารถทนได้ และนิยมแบ่งในลักษณะของเครื่องหมาย หาร (/) เช่น ตัวต้านทานขนาด 1/4 วัตต์ ตัวต้านทานขนาด 1/8 วัตต์ หรือตัวต้านทานขนาด 1/2 วัตต์ นอกจากนี้ตัวต้านทานขนาด 1/2 วัตต์ ยังนิยมเรียกว่า “ตัวต้านทานครึ่งวัตต์” อีกด้วย
การอ่านค่าความต้านทานของตัวต้านทานแบบ Through Hole จะใช้แถบสีในการอ่านค่า ซึ่งแถบสีแต่ละสี และแต่ละลำดับ จะมีความหมายที่แตกต่างกัน สามารถดูได้จากตารางด้านล่างนี้
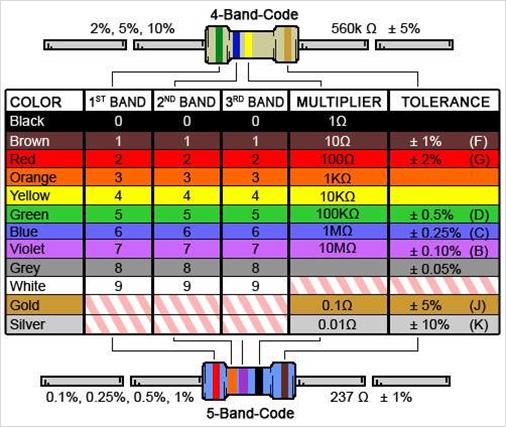
สำหรับตัวต้านทานขนาด 1/4 วัตต์ ค่าความผิดพลาด ±5% จะเป็นที่นิยมใช้งานในงานด้านอิเล็กทรอนิกส์มากที่สุด เนื่องจากมีขนาดที่พอเหมาะ สามารถอ่านค่าได้ง่าย และไม่ตัวใหญ่เกินไปจนทำให้เปลืองพื้นที่วงจร และมีราคาถูกกว่าแบบค่าความต้านทานที่มีค่าความผิดพลาด ±1%
ในงานด้านระบบสมองกลฝังตัว จะนิยมใช้ตัวต้านทานอยู่ 2 ค่า คือ
- 220 – 330Ω ใช้สำหรับจำกัดกระแสไฟฟ้าที่จ่ายให้กับหลอด LED
- 10kΩ ใช้ในวงจร Pull-up Pull-down
ดังนั้นผู้อ่านอาจจะศึกษา และจดจำเฉพาะแถบสีของตัวต้านทาน 2 ค่านี้ ก็เพียงพอต่อการใช้งานแล้ว

รูปที่ 3.4 ตัวต้านทาน 1/4W ค่า 220Ω ±1%

รูปที่ 3.5 ตัวต้านทาน 1/4W ค่า 10kΩ ±1%
ตัวต้านทานปรับค่าได้ (Variable Resistor)
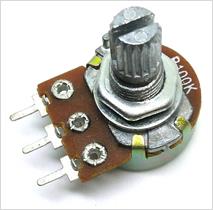
รูปที่ 3.5 ตัวต้านทานปรับค่าได้แบบวอลุ่ม (Potentiometer)
ตัวต้านทานปรับค่าได้ (Variable Resistor) เป็นตัวต้านทานชนิดหนึ่ง ที่สามารถปรับค่าความต้านทานได้ นิยมใช้งานแบบวงจรแบ่งแรงดัน เช่น ใช้ปรับค่าความดังของเสียง ปรับค่าแรงดันเอาต์พุต เป็นต้น
ตัวต้านทานปรับค่าได้มีตัวถังหลายรูปแบบ ในรูปที่ 3.5 เป็นตัวต้านทานปรับค่าได้แบบวอลุ่ม จะมีอยู่ด้วยกัน 2 ชนิด คือชนิด A และชนิด B
- ตัวต้านทานปรับค่าได้แบบวอลุ่มชนิด A ลักษณะการปรับค่าความต้านจะไม่เป็นเชิงเส้น นิยมใช้ในการปรับค่าความดังของเสียง จะหาซื้อได้ยากกว่าชนิด B
- ตัวต้านทานปรับค่าได้แบบวอลุ่มชนิด B ลักษณะของการปรับค่าความต้านทานจะเป็นแบบเชิงเส้น นิยมใช้งานทั่วไป สามารถหาซื้อได้ง่าย
นอกจากนี้ตัวต้านทานปรับค่าได้แบบวอลุ่ม ยังมีแบบชนิดมีแทปกลาง แบบ 2 ชั้น แบบ 4 ชั้น และแบบมีสวิตซ์ในตัว สำหรับในชุดบทความนี้ยกมาแต่แบบธรรมดา 3 ขาเท่านั้น
ตัวต้านทานปรับค่าได้ มีขาใช้งานอยู่ 3 ขา โดยขากลาง จะเป็นขาที่ต่ออยู่กับแกนเพื่อหมุนเลือกค่าความต้านทาน ส่วนอีก 2 ขา จะต่ออยู่กับแถบคาบอนที่มีค่าความต้านทาน
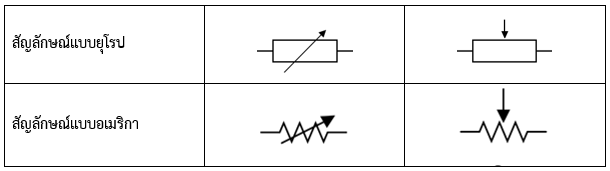
ตารางที่ 3.1 สัญลักษณ์ของตัวต้านทานปรับค่าในวงจรไฟฟ้า
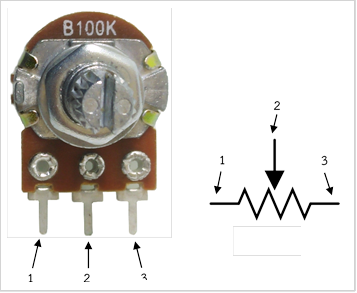
รูปที่ 3.5 ตำแหน่งขาของตัวต้านทานปรับค่าได้แบบวอลุ่ม เมื่อเทียบกับสัญลักษณ์ในวงจรไฟฟ้า
ตัวต้านทานปรับค่าได้แบบวอลุ่ม จะมีค่าความต้านทานระบุอยู่ที่ตัวถัง โดยค่าความต้านทานที่ระบุ คือค่าที่สามารถปรับได้สูงสุด หากนำมัลติมิเตอร์มาวัดที่ขาทั้ง 2 ด้าน ค่าความต้านทาน จะตรงกับค่าที่ระบุบนตัวถัง

รูปที่ 3.6 การดูค่าความต้านทานของตัวต้านทานปรับค่าได้แบบวอลุ่ม
ตัวต้านทานปรับค่าได้แบบวอลุ่ม ค่านิยมใช้มากที่สุดคือ 100kΩ แบบชนิด B ซึ่งในชุดบทความนี้จะใช้ตัวต้านทานปรับค่าได้แบบวอลุ่มค่านี้ในบทถัดไป ๆ
ไดโอดเปล่งแสง (LED)

รูปที่ 3.6 ไดโอดเปล่งแสง หรือหลอด LED
ไดโอดเปล่งแสง (light-emitting diode : LED) เป็นอุปกรณ์อิเล็กทรอนิกส์ที่มีขั้วต่อใช้งาน 2 ขั้ว คือขั้วแอโนด (Anode: A) หรือขั้วบวก ขั้วแคโธด (Cathode: K) หรือขั้วลบ หลักการทำงานมาจากพื้นฐานของไดโอดคือมีสานกึ่งตัวนำชนิด P และ N ต่อชนกัน มีคุณสมบัติยอมให้กระแสไฟฟ้าไหลได้ทางเดียว ตัวหลอด LED นั้นถือเป็นไดโอดชนิดหนึ่ง เมื่อต่อแบบไบอัสตรง (ต่อถูกขั้ว) มีกระแสไฟฟ้าไหลผ่าน จะปล่อยแสงที่มองเห็นได้ออกมา สีของแสงนั้นขึ้นอยู่กับสารที่นำมาทำหลอด LED
การดูขั้วของหลอด LED นั้น สามารถดูได้จากความยาวของขา โดยขายาว จะเป็นขาแอโนด หรือขั้วบวก ขาที่สั้นกว่า จะเป็นขาแคโธด หรือขั้วลบ และสามารถดูได้จากรอยตัดบนฐานของหลอด LED โดยด้านที่เป็นขั้วลบ จะมีรอยตัดออกไป
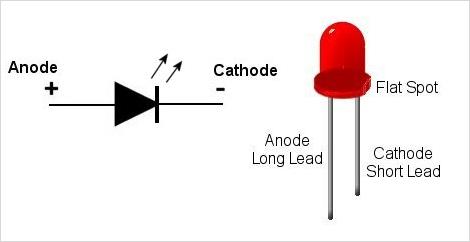
รูปที่ 3.7 สัญลักษณ์ของหลอด LED ในวงจรไฟฟ้า
ตัวถังของหลอด LED นั้น มีหลายรูปแบบ หลายขนาด ที่ใช้ในชุดบทความนี้ เป็นขนาด 5 มิลิเมตรแบบกลม นอกจากนี้ยังมีแบบสีทึบ และสีใส โดยสีใสจะให้ความสว่างมากกว่า และราคาแพงกว่าแบบสีทึบ

รูปที่ 3.8 เปรียบเทียบหลอด LED แบบทึบ และแบบใส
วงจรดิจิตอลในระบบสมองกลฝังตัว
วงจรดิจิตอล คือวงจรที่ทำงานอยู่บนพื้นฐานของสถานเปิด และสถานะปิด ให้คำนึงถึงการเปิด – ปิดหลอดไฟ หากเปิดสวิตซ์ให้หลอดไฟติด จะหมายถึงมีจ่ายกระแสไฟฟ้าให้หลอดไฟ เรียกสถานะนี้ว่า สถานะลอจิก 1 หรือสถานะ HIGH และเมื่อปิดสวิตซ์ให้หลอดไฟดับ จะหมายถึงไม่มีกระแสไฟฟ้าไหลไปที่หลอดไฟ เรียกสถานะนี้ว่า สถานะลอจิก 0 หรือสถานะ LOW
ในไมโครคอนโทรเลอร์จะใช้แรงดันที่เทียบขา GPIO กับกราว์ดในการตัดสินสถานะ โดยหากมีแรงดันที่ขา GPIO มากกว่า 2.8V แต่ไม่เกินแรงดัน VCC จะตัดสินให้เป็นสถานะลอจิก 1 หรือสถานะ HIGH แต่หากแรงดันน้อยกว่า 2.8V และไม่น้อยกว่า 0V จะถือว่าเป็นสถานะลอจิก 0 หรือสถานะ LOW
เนื่องจากหลอดไฟใช้กระแสไฟฟ้าจำนวนมากในการทำงาน ทำให้เห็นผลการทำงานอย่างชัดเจนเมื่อปิดสวิตซ์ หรือวงจรถูกตัดขาด แต่ในไมโครคอนโทรลเลอร์ จะมีความไวในการตรวจจับมาก การปล่อยให้วงจรถูกตัดขาด จะทำให้เกิดสถานะที่เรียกว่า สถานะไม่แน่นอน คืออาจจะเป็น 0 หรือ 1 ก็ได้ เพื่อแก้ปัญหาสภาวะไม่แน่นอนแบบนี้ จึงมีวงจร 2 แบบ ที่ถูกคิดขึ้นมาเพื่อแก้ไขปัญหา โดยหัวใจหลักคือการใช้ตัวต้านทานวางในตำแหน่งต่าง ๆ กัน
ในอุดมคติ เมื่อวัดค่าความต้านทานของขา GPIO จะได้ค่าความต้านทานเป็นอนันต์ หมายถึงขา GPIO เมื่อป้อนพลังงานไฟฟ้า จะไม่มีกระแสไหลเข้าขา GPIO เลย แต่ในความเป็นจริง ขาของ GPIO มีค่าความต้านทานอยู่ แต่สูงมาก จนใช้กระแสไฟฟ้าจ่ายให้ขา GPIO เพียงน้อยนิดก็สามารถทำงานได้แล้ว สาเหตุที่เกิดปัญหาสถานะไม่แน่นอนก็เกิดจากค่าความต้านทานที่สูงมากของ GPIO ที่สัญญาณรบกวนต่าง ๆ เข้ามาแล้วทำให้เกิดกระแสไฟฟ้าไหลจนมีแรงดันไฟฟ้าตกคร่อมขา GPIO แล้วทำให้เกิดสถานะไม่แน่นอนขึ้นมา
วงจร Pull-up
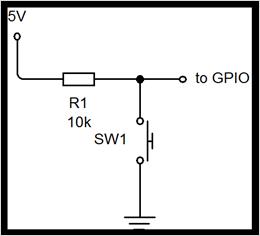
รูปที่ 3.9 วงจรสวิตซ์แบบ Pull-up
เป็นวงจรที่ใช้ตัวต้านทานต่ออยู่กับขาของแหล่งจ่าย และขาอีกด้านต่อกับไมโครคอนโทรลเลอร์ หรือในชุดบทความนี้คือขา GPIO ของ ESP32 ในขณะที่อุปกรณ์อื่น เช่น สวิตซ์ต่ออยู่กับ GPIO และอีกด้านต่อกับขั้วลบของแหล่งจ่าย หรือขากราว์ด
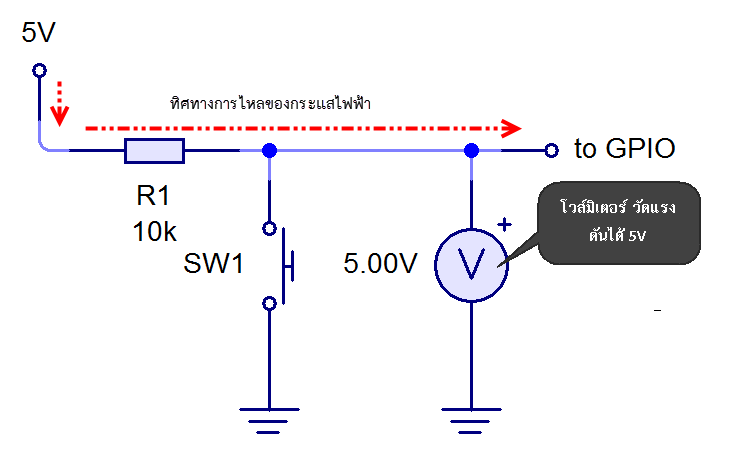
หลักการทำงานของวงจร Pull-up คือ เมื่ออยู่ในสภาวะปกติ จะมีกระแสไฟฟ้าไหลจากแหล่งจ่าย (ตามวงจรคือ 5V) ไหลผ่านตัวต้านทาน ไปเข้าขา GPIO แล้วไหลลงกราว์ด แรงดันที่ตกคร่อม GPIO จึงอยู่ที่ 5V ทำให้ได้สถานะคงที่เป็นลอจิก 1 หรือสถานะ HIGH
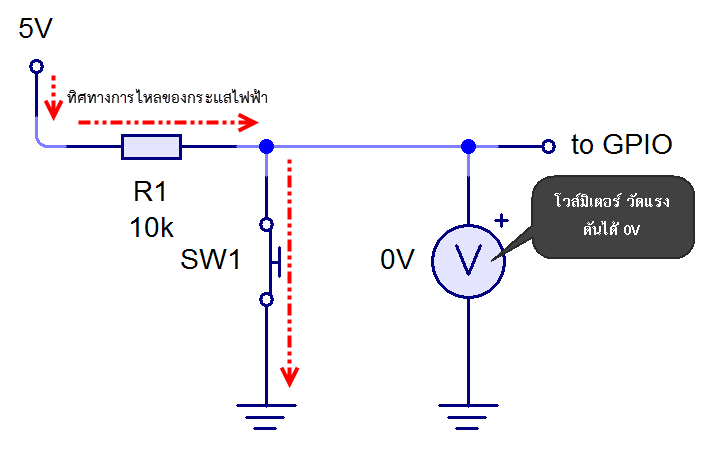
แต่เมื่อมีการกดสวิตซ์ กระแสไฟฟ้าที่ไหลผ่านตัวต้านทาน ไหลผ่านสวิตซ์ลงไปที่กราว์ดทั้งหมด ทำให้แรงดันที่ขา GPIO มีค่า 0V แล้วได้สถานะทางลอจิกเป็น 0 หรือสถานะ LOW หรือพิจารณาว่าขา GPIO ต่อโดยตรงกับกราว์ด ทำให้ไม่มีกระแสใด ๆ ไหลเข้าขา GPIO ก็ได้เช่นเดียวกัน
วงจร Pull-up นิยมใช้งานในการสื่อสารแบบอนุกรมด้วย เช่น การสื่อสารแบบ I2C 1-wire เพื่อให้การสื่อสารถูกต้อง ไม่มีสัญญาณรบกวนเข้ามาทำให้การสื่อสารผิดพลาด
วงจร Pull-down
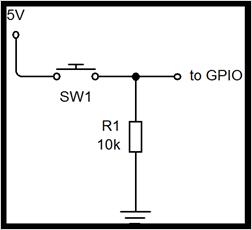
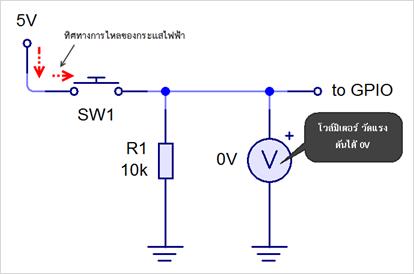
รูปที่ 3.10 วงจรสวิตซ์แบบ Pull-down
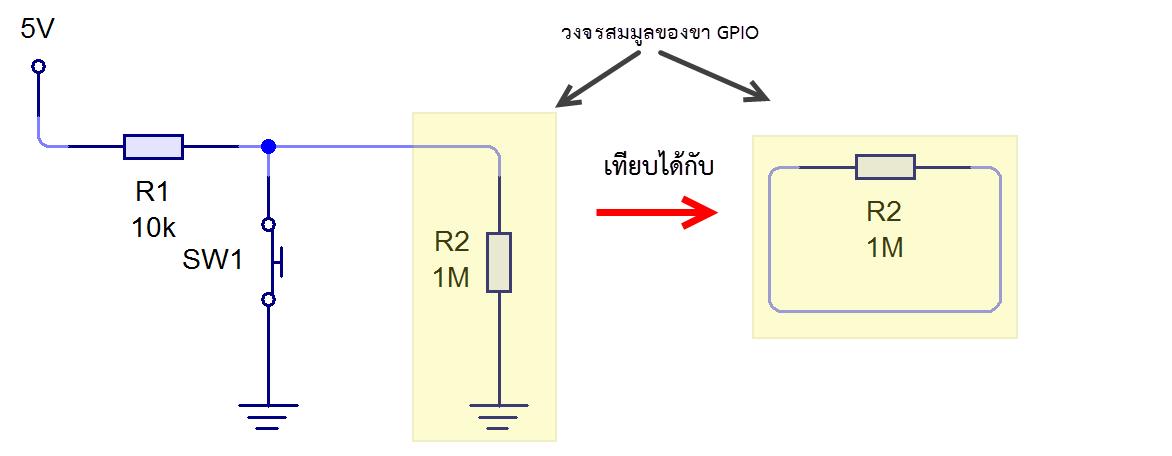
ลักษณะการทำงานจะคล้ายกลับวงจร Pull-up เพียงแต่เมื่ออยู่ในสภาวะปกติ จะอ่านค่าสถานะทางลอจิกได้เป็น 0 หรือสถานะ LOW เนื่องจากตัวต้านทาน R1 จะทำหน้าที่ดึงกระแสไฟฟ้าที่มีขนาดเล็กให้ลงกราว์ดทั้งหมด หรือสามารถพิจารณาได้อีกแบบว่า เป็นการเพิ่มค่าความต้านทานให้กับขา GPIO ก็ได้เช่นเดียวกัน เมื่อค่าความต้านทานของขา GPIO น้อยลง จะทำให้ต้องใช้กระแสไฟฟ้ามากขึ้นจ่ายให้ขา GPIO จึงทำให้สัญญาณรบกวนต่าง ๆ ที่มีกระแสน้อยไม่สามารถผ่านเข้าไปยังขา GPIO แล้วทำให้ได้แรงดันถึง 2.8V เพื่อให้ตัดสินสถานะให้เป็นลอจิก 1 หรือสถานะ HIGH ได้
สมมุติให้ขา GPIO มีค่าความต้านทาน 1MΩ จะใช้กระแสไฟฟ้าเพียง 2.8uA เพื่อให้แรงดันขา GPIO มีแรงดันตกคร่อม 2.8V (คิดตามกฏของโอห์ม) แต่หากค่าความต้านทานของขา GPIO มีค่าน้อยลงจากการขนานตัวต้านทาน 10kΩ เป็น 9.9kΩ (คิดตามสูตรขนานตัวต้านทาน) จะต้องใช้กระแสไฟฟ้า 282.82uA จึงจะมีแรงดันตกคร่อมขา GPIO ถึง 2.8V แล้วตัดสินสถานะเป็นลอจิก 1 หรือสถานะ HIGH ได้
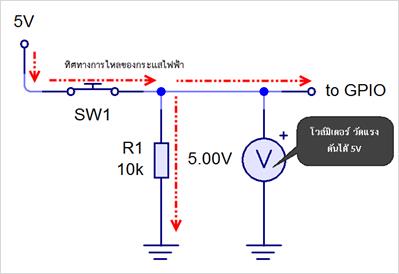
แต่เมื่อมีการกดสวิตซ์ กระแสไฟฟ้าที่มากพอสามารถไหลเข้าไปตกคร่อมที่ตัวต้านทานและขา GPIO ได้ เปรียบเหมือนนำขา GPIO ไปต่อเข้ากับแหล่งจ่าย ทำให้แรงดันที่ขา GPIO เท่ากับแรงดันของแหล่งจ่าย แล้วตัดสินสถานะได้เป็นลอจิก 1 หรือสถานะ HIGH นั่นเอง
คำที่ใช้เรียกสถานะการทำงานของอุปกรณ์
อุปกรณ์ที่ทำงานแบบดิจิตอล คือมีสถานะเปิด และปิด หรือสถานะทางดิจิตอล นิยมใช้คำเรียกการทำงานได้เป็น 2 แบบ คือ
- Active HIGH หมายถึง เมื่ออุปกรณ์นั้น ๆ ทำงาน เช่น มีการกดสวิตซ์ มีการตรวจจับความเคลื่อนไหวได้ ให้สถานะทางขาเอาต์พุตออกมาเป็นลอจิก 1 หรือสถานะ HIGH จะเรียกว่า Active HIGH
- Active LOW หมายถึง เมื่ออุปกรณ์นั้น ๆ ทำงาน เช่น มีการกดสวิตซ์ มีการตรวจจับความเคลื่อนไหวได้ ให้สถานะทางขาเอาต์พุตออกมาเป็นลอจิก 0 หรือสถานะ LOW จะเรียกว่า Active LOW
Active HIGH / LOW จะสัมพันธ์กับวงจร Pull-up / Pull-down เช่น หากต่อวงจรสวิตซ์แบบ Pull-up เมื่อมีการกดสวิตซ์แล้วสถานะเอาต์พุตเป็น LOW จะเรียกการทำงานแบบนี้ว่า ทำงานแบบ Active LOW แต่หากต่อวงจรสวิตซ์แบบ Pull-down เมื่อมีการกดสวิตซ์ จะให้สถานะทางเอาต์พุตเป็น HIGH จะเรียกการทำงานแบบนี้ว่า ทำงานแบบ Active HIGH
สรุปท้ายบท
พื้นฐานที่แข็งแรงด้านอิเล็กทรอนิกส์ จะทำให้ผู้อ่านสามารถต่อยอดการใช้งาน ESP32 ไปได้ง่ายมากยิ่งขึ้น ผู้เขียนได้ยกเฉพาะอุปกรณ์ที่ใช้ในชุดบทความนี้มาพูดถึงเท่านั้น เรื่องอุปกรณ์ และวงจรดิจิตอลยังมีอีกมาก ผู้อ่านสามารถค้นหาข้อมูลเพิ่มเติมได้โดยอ่านหนังสือเกี่ยวกับพื้นฐานอิเล็กทรอนิกส์ และวงจรดิจิตอล

 ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266




TOP เลื่อนขึ้นบนสุด
