

คู่มือการใช้งาน KidMotor V3 บทที่ 3 การเขียนโปรแกรมสั่งงานอุปกรณ์ผ่าน KidMotor
ผู้พัฒนา KidMotor V3 ได้จัดเตรียมปลั๊กอิน / ส่วนเสริม / ไลบารี่ สำหรับใช้ในโปรแกรม KidBrightIDE, KBIDE, microBlock IDE และ ArduinoIDE ไว้ให้แล้ว ผู้ใช้สามารถเลือกใช้โปรแกรมใดก็ได้ในการพัฒนา
เขียนโปรแกรมสั่งงานด้วย KidBrightIDE
รองรับการเขียนโปรแกรมสั่งงานบอร์ด KidBright32 ทุกรุ่น และบอร์ด OpenKB โดยมีขั้นตอนการเริ่มต้นใช้งานดังนี้
ติดตั้งปลั๊กอิน KidMotor V3
ดาวน์โหลดปลั๊กอิน KidMotor V3 ได้ที่ https://store.kidbright.info/plugin/46/KidMotor+V3 โดยเลื่อนมาด้านล่างของหน้า กดข้อความ ดาวน์โหลดเวอร์ชั่นนี้
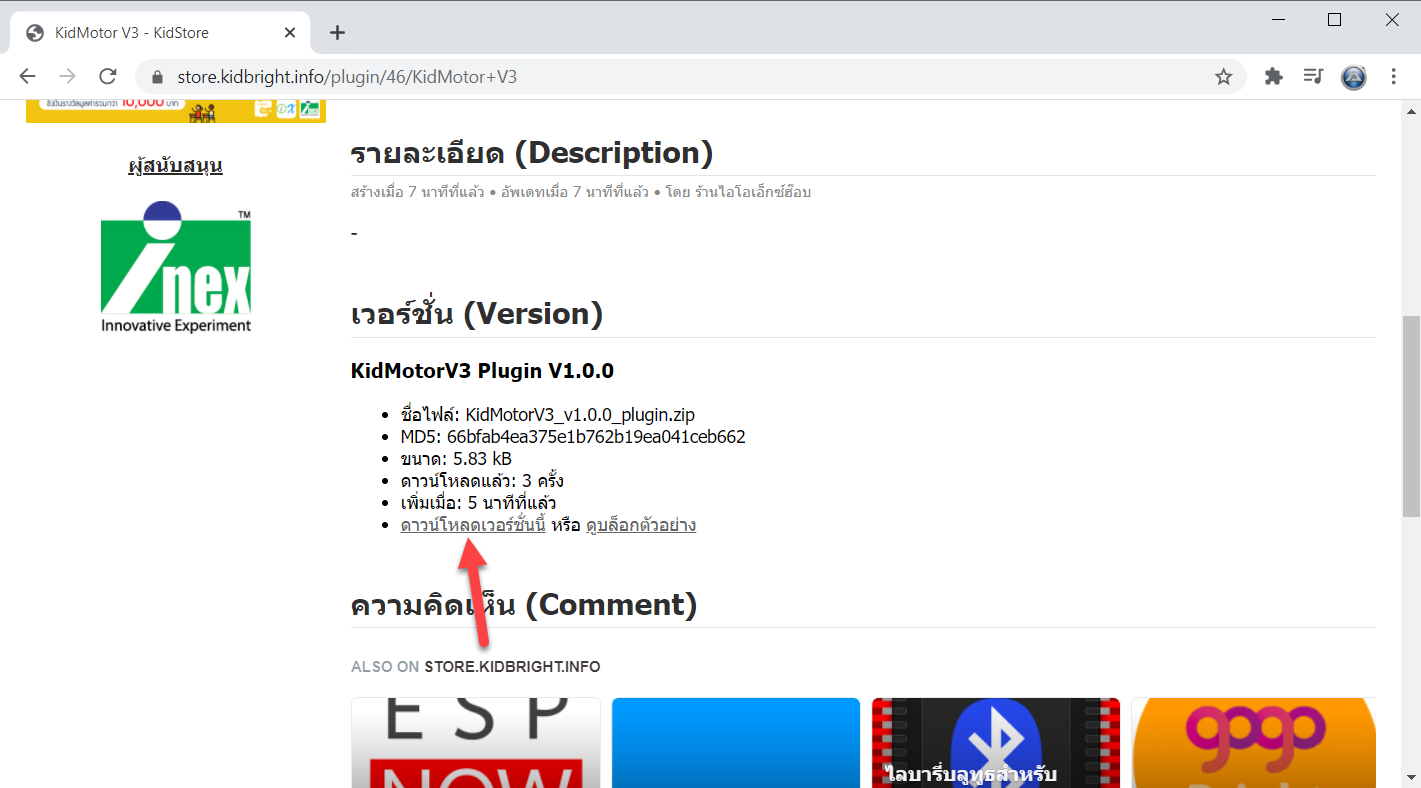
จะขึ้นให้ดาวน์โหลดไฟล์ปลั๊กอิน เลือกที่เก็บไฟล์ไว้ที่ใดก็ได้
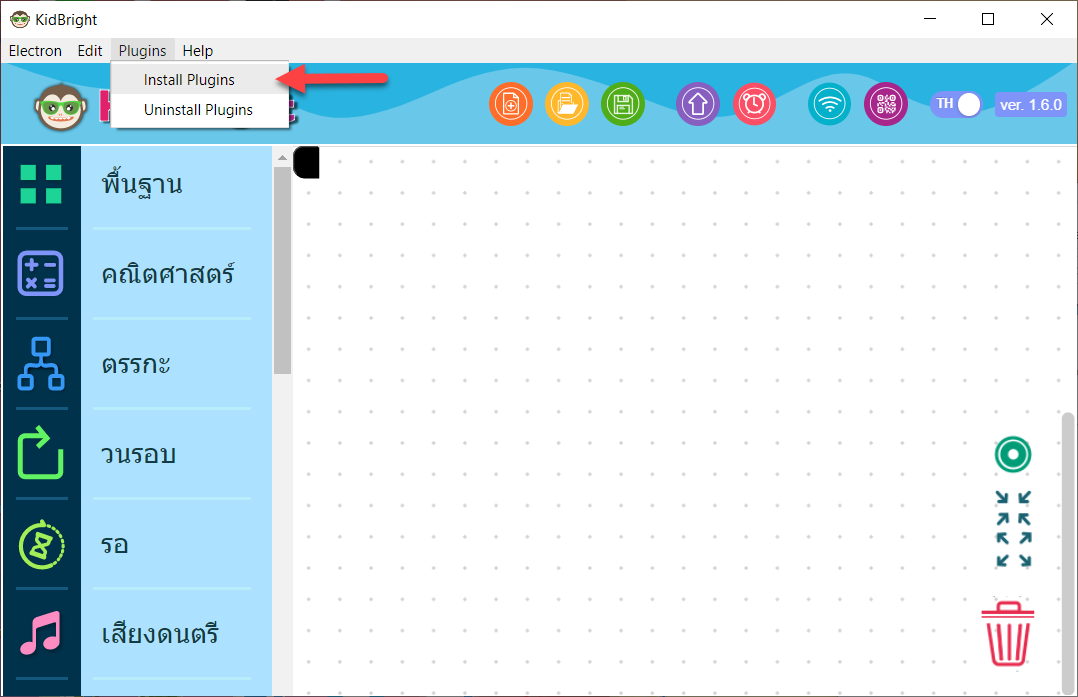
เปิดโปรแกรม KidBrightIDE ขึ้นมา กด Plugin > Install Plugin
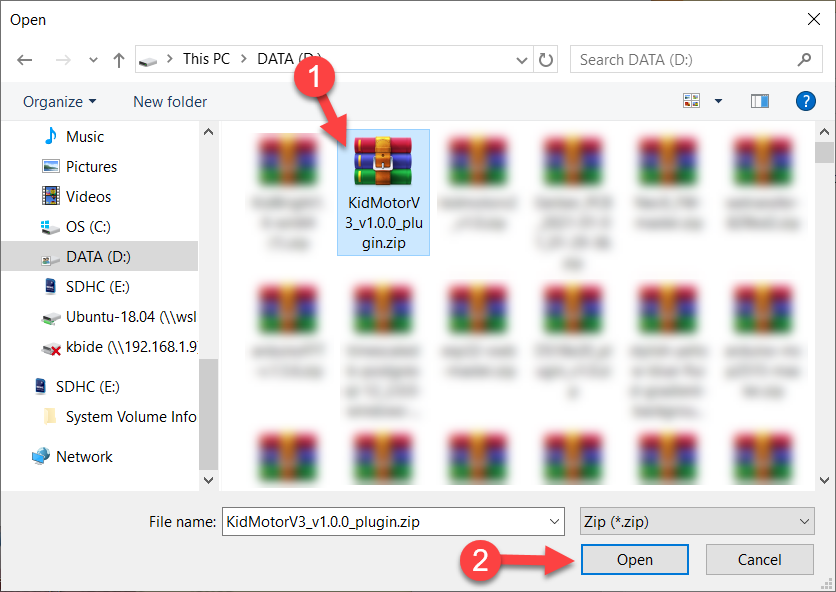
กดเลือกไฟล์ปลั๊กอินที่ได้ดาวน์โหลดมา (1) แล้วกดปุ่ม Open (2)
รอจนกว่าจะติดตั้งปลั๊กอินเสร็จ
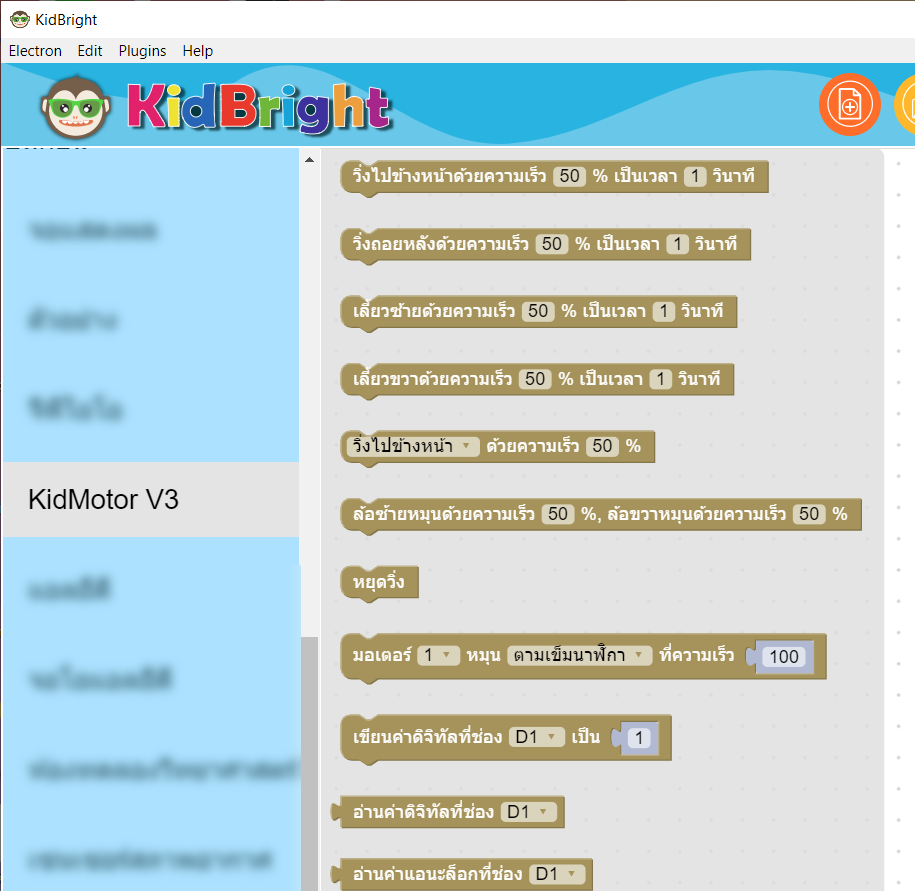
หลังจากติดตั้งปลั๊กอิน KidMotor V3 เสร็จแล้ว โปรแกรมจะปิดและเปิดใหม่อัตโนมัติ กดที่เมนู ปลั๊กอิน > KidMotor V3 ก็จะมีบล็อกใหม่เพิ่มเข้ามาแล้ว
การเขียนโปรแกรมสั่งงานมอเตอร์
ปลั๊กอิน KidMotor V3 ได้จัดเตรียมบล็อกคำสั่งสำหรับสั่งงานมอเตอร์โดยแบ่งเป็น 2 กลุ่ม คือกลุ่มบล็อกสำหรับสั่งงานหุ่นยนต์ (รถ) มีบล็อกดังนี้
บล็อกวิ่งไปข้างหน้า ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกวิ่งถอยหลัง ใช้สั่งให้หุ่นยนต์วิ่งถอยหลัง ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวซ้าย ใช้สั่งให้หุ่นยนต์เลี้ยวซ้าย (มอเตอร์ซ้ายหยุดหมุน มอเตอร์ขวาหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวขวา ใช้สั่งให้หุ่นยนต์เลี้ยวขวา (มอเตอร์ซ้ายหมุน มอเตอร์ขวาหยุดหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อก...ด้วยความเร็ว ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า/ถอยหลัง/เลี้ยวซ้าย/เลี้ยวขวา ด้วยความเร็วที่กำหนด

บล็อกล้อซ้าย/ขวาหมุน ใช้สั่งให้หุ่นยนต์วิ่งตามรูปแบบที่กำหนดโดยกำหนดความเร็วของล้อแต่ละข้าง หากกำหนดเป็นค่าบวก 1 ถึง 100 ล้อจะหมุนไปด้านหน้า หากกำหนดค่าเป็นลบ -1 ถึง -100 ล้อจะหมุนไปด้านหลัง หากกำหนดเป็น 0 ล้อจะหยุดหมุน

บล็อกหยุดวิ่ง ใช้สั่งให้หุ่นยนต์หยุดวิ่ง (มอเตอร์ทุกตัวหยุดหมุน)

กลุ่มบล็อกสั่งงานมอเตอร์ มีดังนี้
มอเตอร์...หมุน... ที่ความเร็ว ใช้กำหนดทิศทางและความเร็วของมอเตอร์ที่กำหนด

การเขียนโปรแกรมควบคุมอินพุต/เอาต์พุต
เขียนค่าดิจิทัล ใช้สั่งให้ช่อง D1 ถึง D5 ส่งสัญญาณดิจิทัลลอจิก 0 หรือ 1

อ่านค่าดิจิทัล ใช้อ่านค่าดิจิทัลที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็มตามลอจิกที่อ่านได้

อ่านค่าแอนะล็อก ใช้อ่านค่าแอนะล็อกที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็ม 0 ถึง 4095

โครงงานรถวิ่งตามโปรแกรม
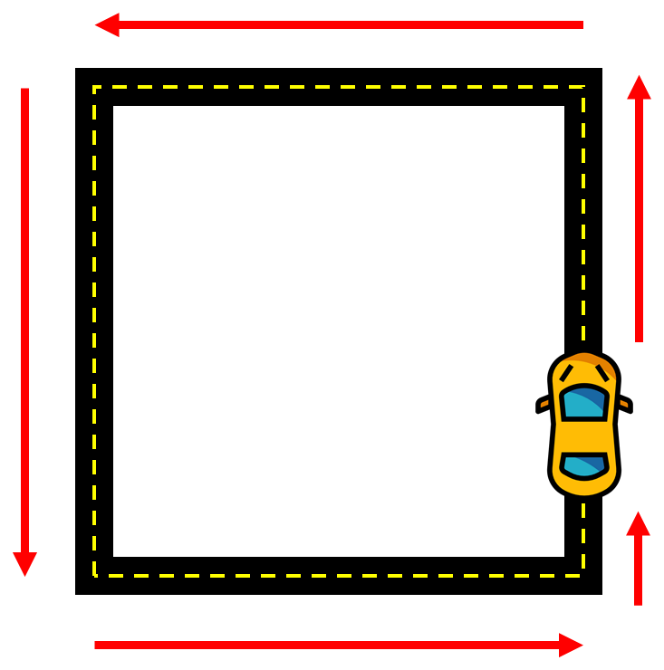
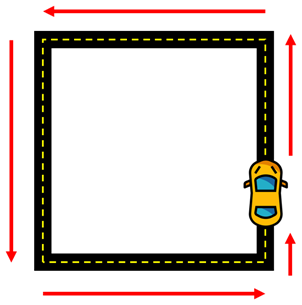
ตัวอย่างเขียนโปรแกรมให้รถวิ่งตามทิศทางเป็นสี่เหลี่ยมดังนี้
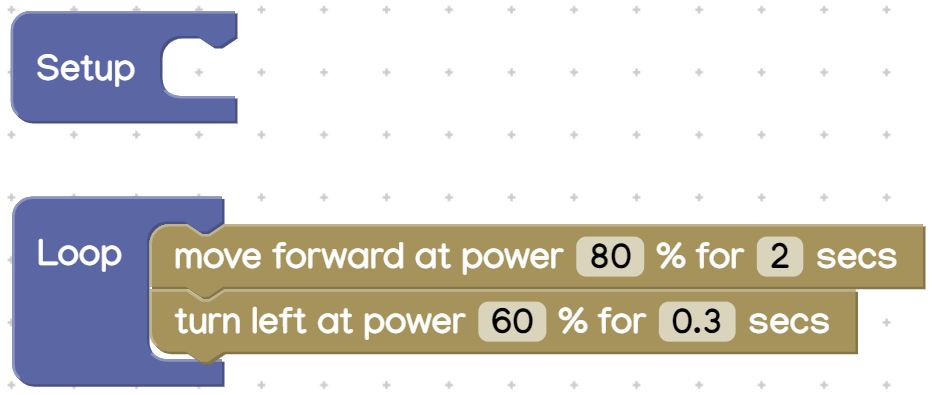
เขียนโปรแกรมได้ดังนี้

หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้บล็อกวิ่งไปข้างหน้า เพื่อให้รถวิ่งไปข้างหน้า ตามระยะทางที่กำหนดด้วยเวลา ด้วยความเร็ว 80%
- ใช้บล็อกเลี้ยวซ้าย เพื่อสั่งให้เลี้ยวซ้าย กำหนดระยะเลี้ยวด้วยเวลา ด้วยความเร็วในการเลี้ยว 60%
รถจะวิ่งตรงแล้วเลี่ยวซ้ายไปเรื่อย ๆ ไปเป็นสี่เหลี่ยม
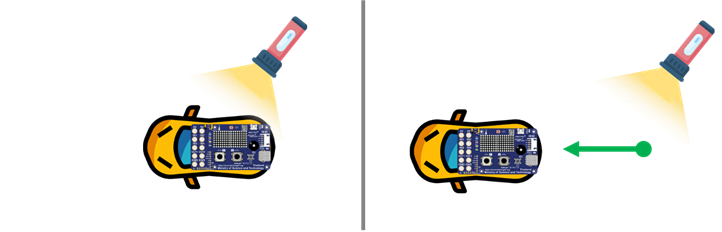
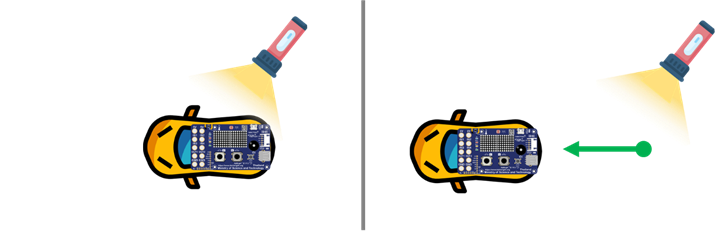
โครงงานรถวิ่งหนีแสง
เมื่อนำแสงเข้าไปใกล้กับตัวรถ รถจะวิ่งไปข้างหน้าเพื่อหนีแสง
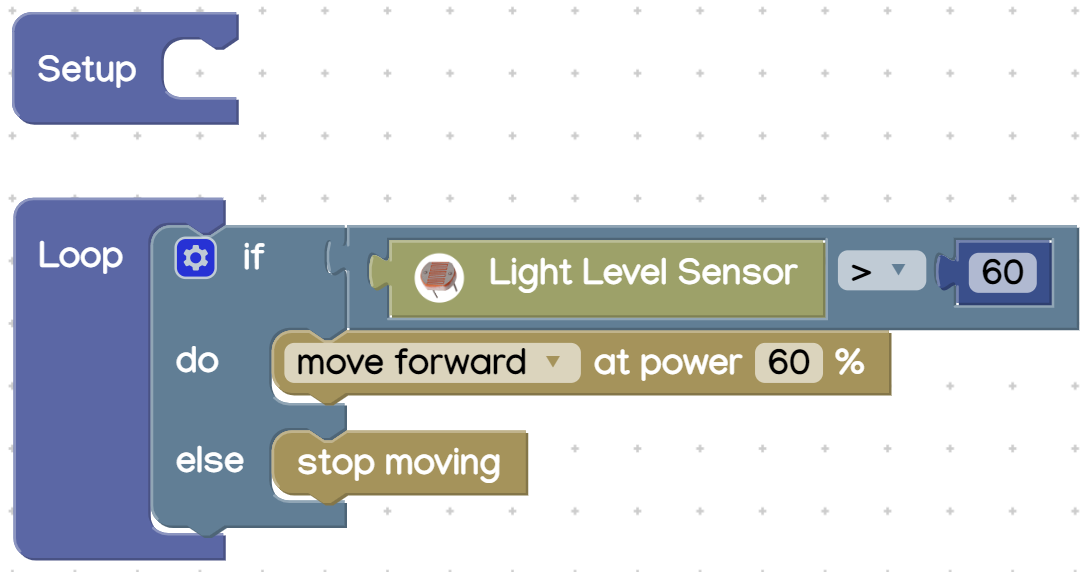
โครงงานนี้ใช้เซ็นเซอร์ตรวจจับแสงบนบอร์ด KidBright32 / OpenKB เขียนโปรแกรมได้ดังนี้

หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้าด้วยความเร็ว 60%
- ถ้าไม่ใช่ ให้
- รถหยุดวิ่ง
- หน่วงเวลาการทำงาน 0.1 วินาที
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
เมื่อเซ็นเซอร์แสงได้รับแสงจากไฟฉาย รถจะวิ่งไปข้างหน้าเพื่อหนีแสง ตามที่ได้เขียนโปรแกรมไว้
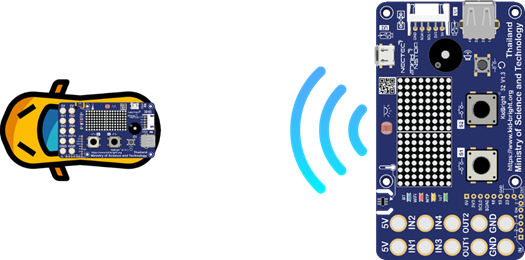
โครงงานรถบังคับ
โครงงานนี้ใช้บอร์ด KidBright32/OpenKB จำนวน 2 ตัว โดยตัวที่ 1 ติดอยู่กับรถและบอร์ด KidMotor V3 และตัวที่ 2 เป็นรีโมทควบคุม

การรับ-ส่งสัญญาณควบคุมรถใช้ ESP-NOW ซึ่งติดตั้งปลั๊กอินเสริมชื่อ ESP-NOW ตามขั้นตอนดังนี้
เข้าไปดาวน์โหลดปลั๊กอิน ESP-NOW ที่ https://store.kidbright.info/plugin/18/ESP-NOW กด ดาวน์โหลดเวอร์ชั่นนี้ ของเวอร์ชั่นล่าสุด
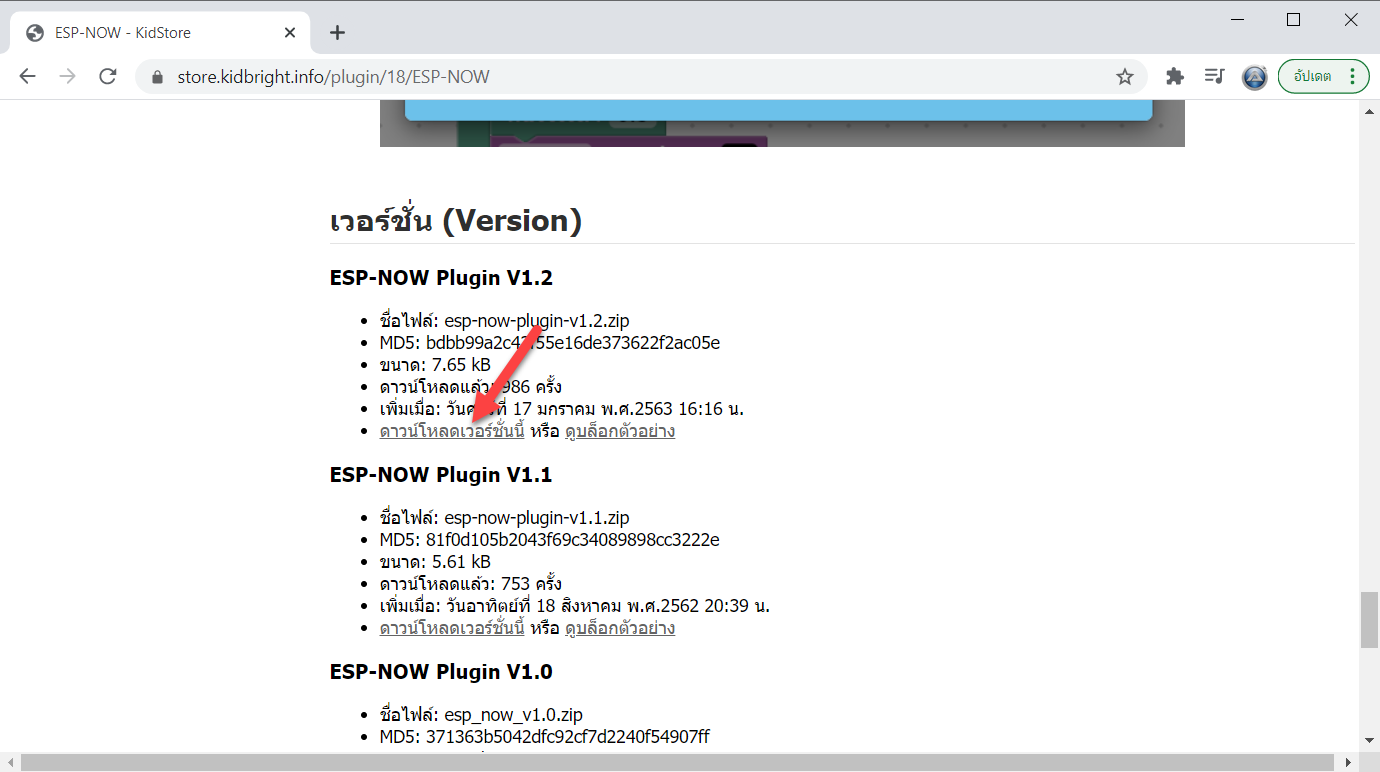
จะขึ้นให้ดาวน์โหลดไฟล์ปลั๊กอินแล้ว ให้บันทึกไฟลนี้ไว้ที่ใดก็ได้
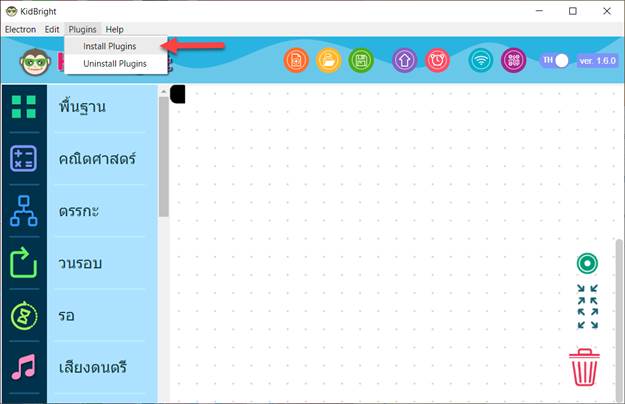
ที่โปรแกรม KidBrightIDE กด Plugin > Install Plugin
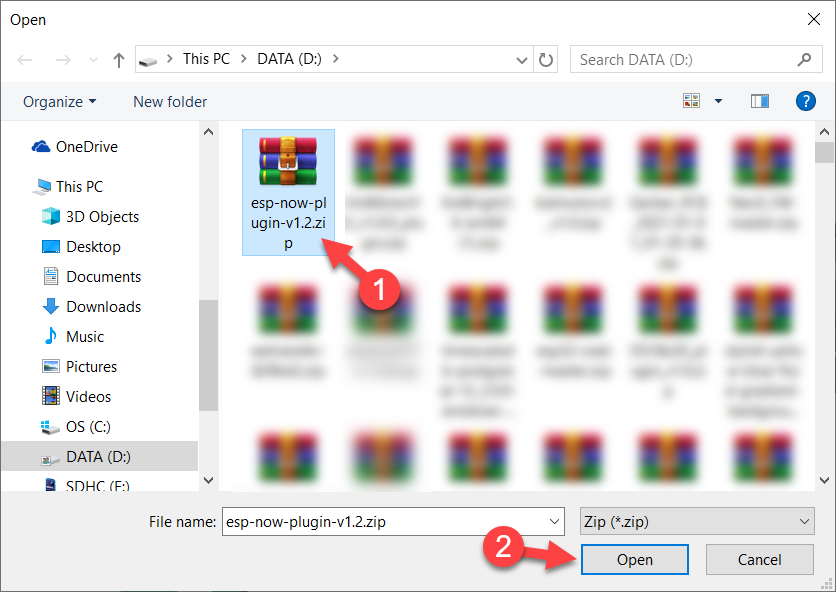
กดเลือกไฟล์ปลั๊กอินที่ได้ดาวน์โหลดมา (1) แล้วกดปุ่ม Open (2)
รอจนกว่าจะติดตั้งปลั๊กอินเสร็จ
หลังจากติดตั้งปลั๊กอิน ESP-NOW เสร็จแล้ว โปรแกรมจะปิดและเปิดใหม่อัตโนมัติ กดที่เมนู ปลั๊กอิน > ESP-NOW ก็จะมีบล็อกใหม่เพิ่มเข้ามาแล้ว
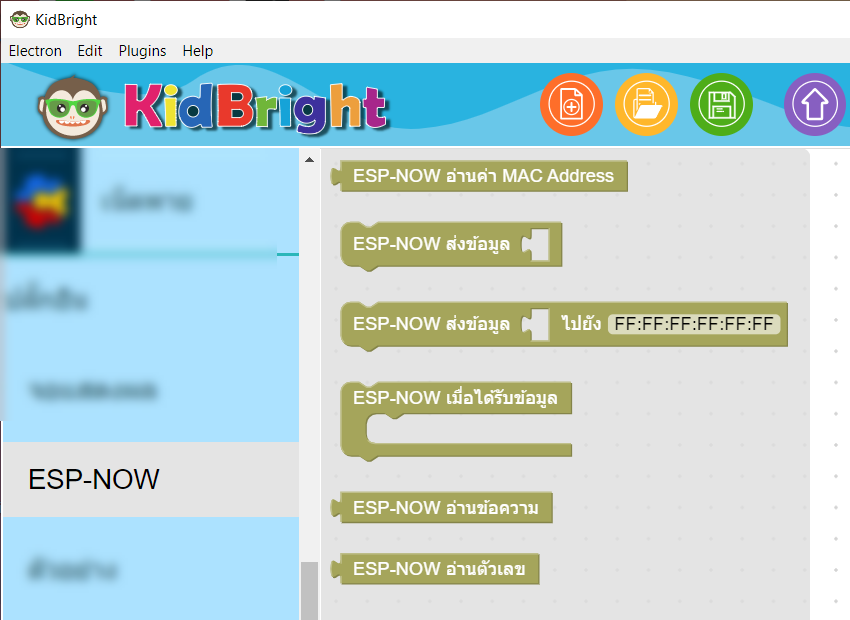
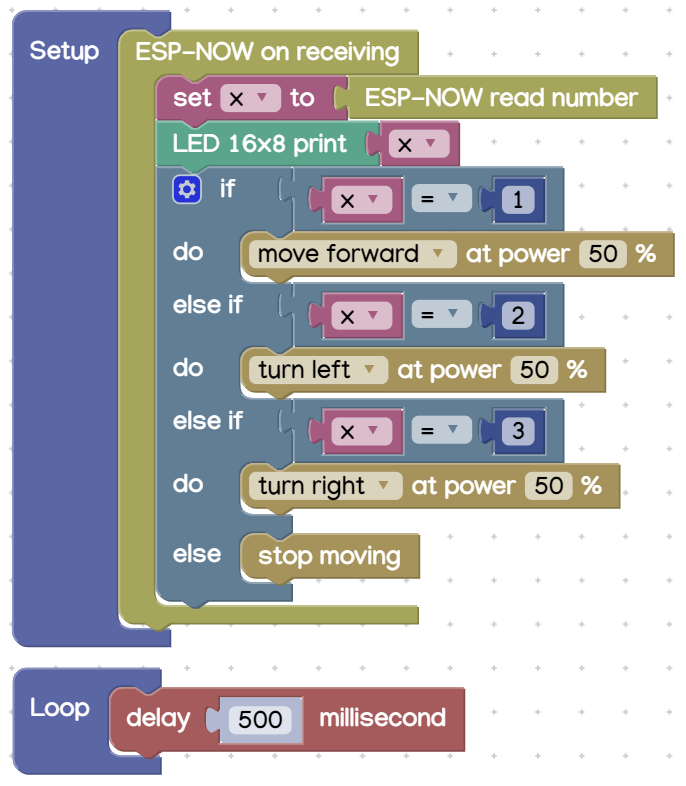
เขียนโปรแกรมที่ฝั่งรถดังนี้
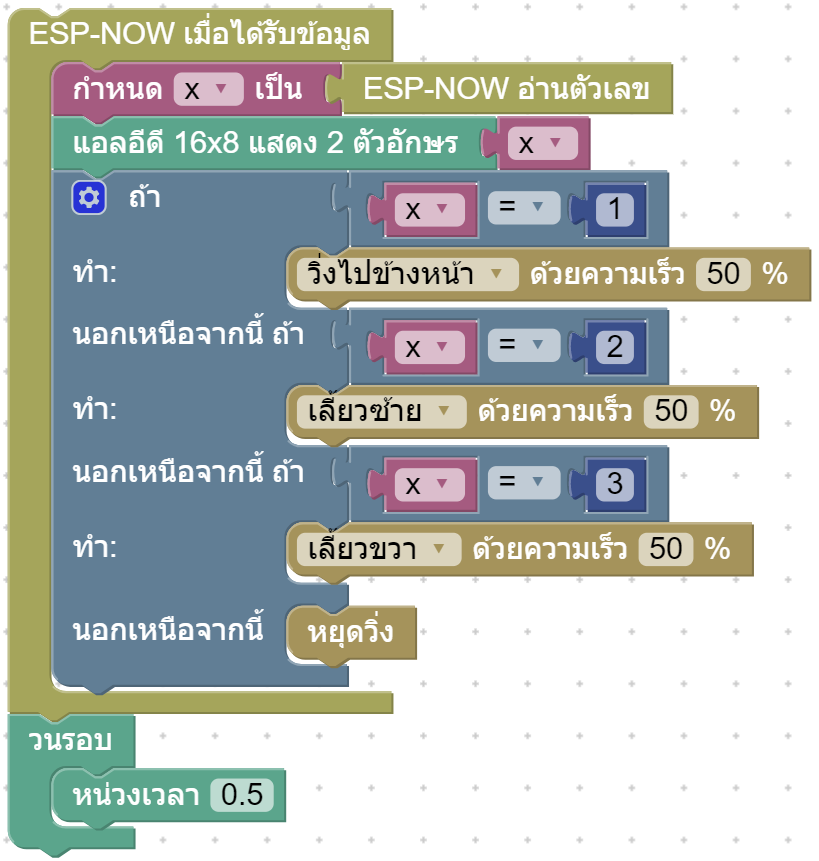
หลักการทำงานของโปรแกรม
- ใช้บล็อก ESP-NOW เมื่อได้รับข้อมูล กำหนดให้ทำโปรแกรมภายใต้บล็อกนี้เมื่อได้รับข้อมูลจาก ESP-NOW
- ใช้บล็อก ESP-NOW อ่านตัวเลข อ่านข้อมูลแบบตัวเลขจาก ESP-NOW แล้วเก็บลงตัวแปร x
- แสดงผลค่าในตัวแปร x บนแอลอีดี 16x8
- ใช้บล็อกเงื่อนไขตรวจสอบว่าค่าในตัวแปร x คือ 1 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้า
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 2 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวซ้าย
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 3 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวขวา
- ถ้าไม่ตรงกับเงื่อนไขใดเลย ให้
- สั่งให้รถหยุดวิ่ง
- ใช้บล็อกวนรอบ กำหนดโปรแกรมภายใต้บล็อกนี้ทำงานตลอดเวลา
- หน่วงเวลา 0.5 วินาที
ที่ฝั่งรีโมทเขียนโปรแกรมดังนี้
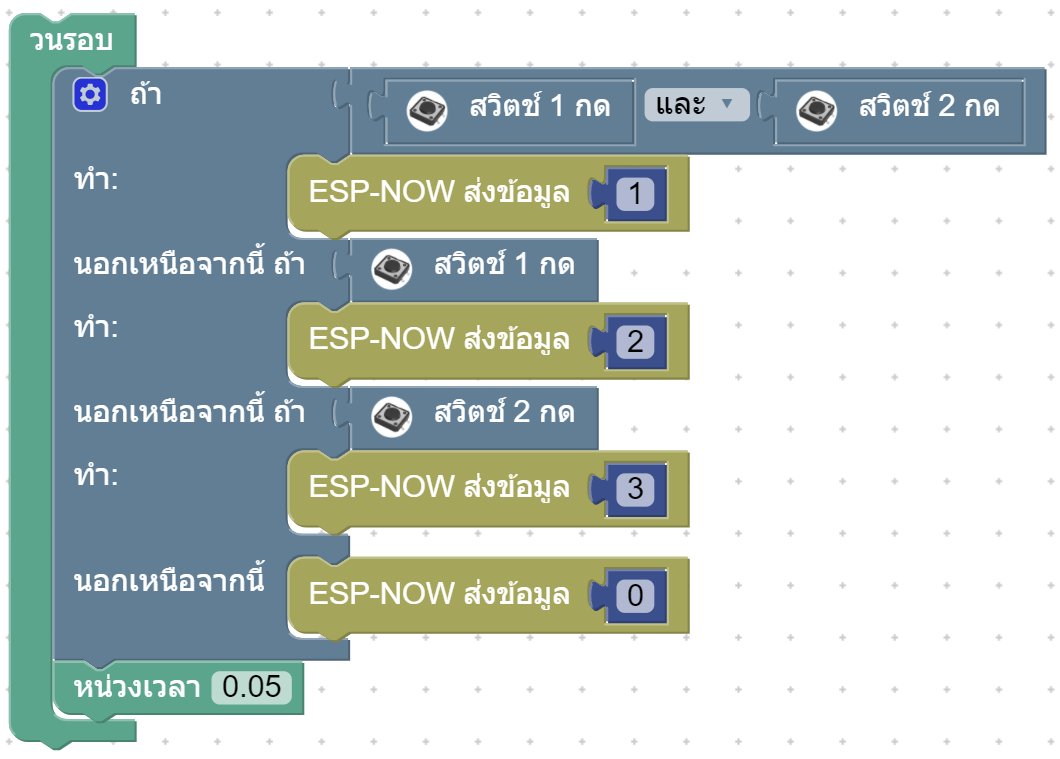
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ กำหนดโปรแกรมภายใต้บล็อกนี้ทำงานตลอดเวลา
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 1 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 2 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 3 ผ่าน ESP-NOW
- ถ้าไม่ตรงกับเงื่อนไขใดเลย
- ส่งเลข 0 ผ่าน ESP-NOW
- หน่วงเวลา 0.05 วินาที
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
หลังจากอัพโหลดโปรแกรมที่ฝั่งรถและฝั่งรีโมทแล้ว ทดสอบการทำงานดังนี้
- กดปุ่ม S1 และ S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 1 และรถวิ่งไปข้างหน้า
- กดปุ่ม S1 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวซ้าย
- กดปุ่ม S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวขวา
- ไม่กดปุ่มใดเลย ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 0 และรถหยุดวิ่ง
กรณีรถวิ่งทิศทางไม่ถูกต้อง ให้อ่านวิธีแก้ไขได้ในภาคผนวก
เขียนโปรแกรมสั่งงานด้วย KBIDE
รองรับการเขียนโปรแกรมสั่งงานบอร์ด KidBright32 ทุกรุ่น บอร์ด OpenKB บอร์ด IPST-WiFi บอร์ด Arduino และบอร์ด ESP32 ทุกรุ่น โดยมีขั้นตอนการเริ่มต้นใช้งานดังนี้
ติดตั้งปลั๊กอิน KidMotor V3
ดาวน์โหลดปลั๊กอิน KidMotor V3 ได้ที่ https://github.com/ioxhop/kbide-KidMotorV3 โดยกดปุ่ม Code เลือก Download ZIP
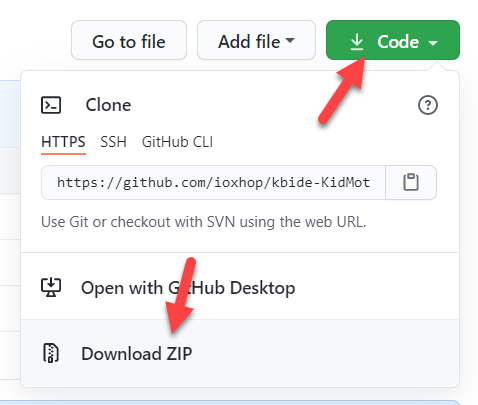
จะขึ้นให้ดาวน์โหลดไฟล์ปลั๊กอิน เลือกที่เก็บไฟล์ไว้ที่ใดก็ได้

คลายไฟล์ ZIP ด้วยโปรแกรม WinRAR หรือ 7-zip จะได้โฟลเดอร์ kbide-KidMotorV3-main มา
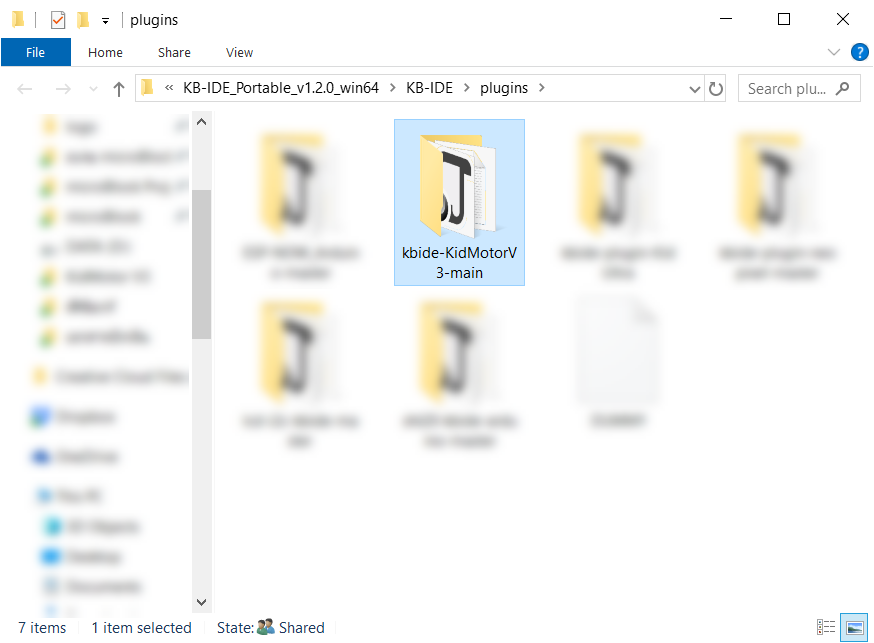
เปิดโปรแกรม KBIDE ขึ้นมา กด File > Open Plugin folder
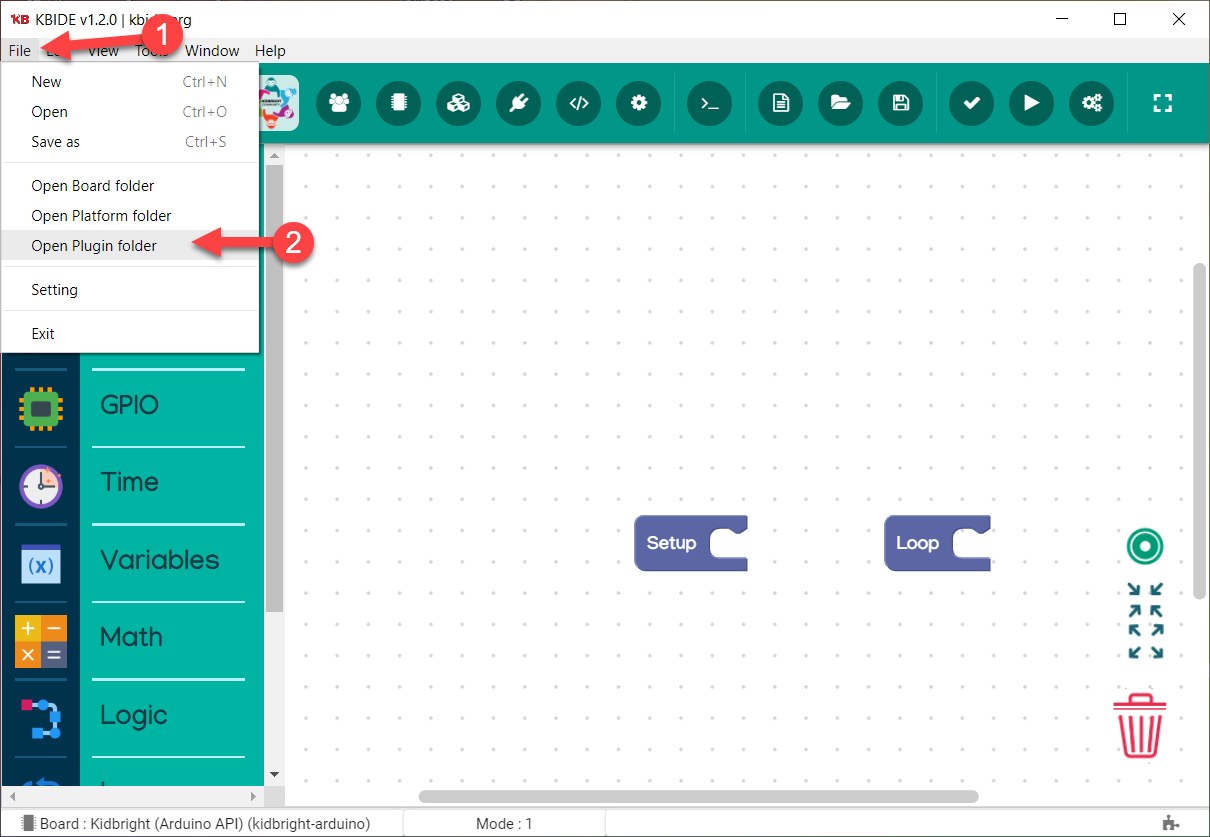
โฟลเดอร์ plugin จะเปิดขึ้นมา ให้คัดลอกโฟลเดอร์ kbide-KidMotorV3-main มาใส่ในโฟลเดอร์นี้
ปิดและเปิดโปรแกรม KBIDE ใหม่อีกครั้ง กดที่เมนู Plugin > KidMotor V3 ก็จะมีบล็อกใหม่เพิ่มเข้ามาแล้ว

การเขียนโปรแกรมสั่งงานมอเตอร์
ปลั๊กอิน KidMotor V3 ได้จัดเตรียมบล็อกคำสั่งสำหรับสั่งงานมอเตอร์โดยแบ่งเป็น 2 กลุ่ม คือกลุ่มบล็อกสำหรับสั่งงานหุ่นยนต์ (รถ) มีบล็อกดังนี้
บล็อกวิ่งไปข้างหน้า ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกวิ่งถอยหลัง ใช้สั่งให้หุ่นยนต์วิ่งถอยหลัง ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวซ้าย ใช้สั่งให้หุ่นยนต์เลี้ยวซ้าย (มอเตอร์ซ้ายหยุดหมุน มอเตอร์ขวาหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวขวา ใช้สั่งให้หุ่นยนต์เลี้ยวขวา (มอเตอร์ซ้ายหมุน มอเตอร์ขวาหยุดหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อก...ด้วยความเร็ว ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า/ถอยหลัง/เลี้ยวซ้าย/เลี้ยวขวา ด้วยความเร็วที่กำหนด

บล็อกล้อซ้าย/ขวาหมุน ใช้สั่งให้หุ่นยนต์วิ่งตามรูปแบบที่กำหนดโดยกำหนดความเร็วของล้อแต่ละข้าง หากกำหนดเป็นค่าบวก 1 ถึง 100 ล้อจะหมุนไปด้านหน้า หากกำหนดค่าเป็นลบ -1 ถึง -100 ล้อจะหมุนไปด้านหลัง หากกำหนดเป็น 0 ล้อจะหยุดหมุน

บล็อกหยุดวิ่ง ใช้สั่งให้หุ่นยนต์หยุดวิ่ง (มอเตอร์ทุกตัวหยุดหมุน)

กลุ่มบล็อกสั่งงานมอเตอร์ มีดังนี้
มอเตอร์...หมุน... ที่ความเร็ว ใช้กำหนดทิศทางและความเร็วของมอเตอร์ที่กำหนด

การเขียนโปรแกรมควบคุมอินพุต/เอาต์พุต
เขียนค่าดิจิทัล ใช้สั่งให้ช่อง D1 ถึง D5 ส่งสัญญาณดิจิทัลลอจิก 0 หรือ 1

อ่านค่าดิจิทัล ใช้อ่านค่าดิจิทัลที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็มตามลอจิกที่อ่านได้

อ่านค่าแอนะล็อก ใช้อ่านค่าแอนะล็อกที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็ม 0 ถึง 4095

โครงงานรถวิ่งตามโปรแกรม
ตัวอย่างเขียนโปรแกรมให้รถวิ่งตามทิศทางเป็นสี่เหลี่ยมดังนี้
เขียนโปรแกรมได้ดังนี้
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้บล็อกวิ่งไปข้างหน้า เพื่อให้รถวิ่งไปข้างหน้า ตามระยะทางที่กำหนดด้วยเวลา ด้วยความเร็ว 80%
- ใช้บล็อกเลี้ยวซ้าย เพื่อสั่งให้เลี้ยวซ้าย กำหนดระยะเลี้ยวด้วยเวลา ด้วยความเร็วในการเลี้ยว 60%
รถจะวิ่งตรงแล้วเลี่ยวซ้ายไปเรื่อย ๆ ไปเป็นสี่เหลี่ยม
โครงงานรถวิ่งหนีแสง
เมื่อนำแสงเข้าไปใกล้กับตัวรถ รถจะวิ่งไปข้างหน้าเพื่อหนีแสง
โครงงานนี้ใช้เซ็นเซอร์ตรวจจับแสงบนบอร์ด KidBright32 / OpenKB เขียนโปรแกรมได้ดังนี้
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้าด้วยความเร็ว 60%
- ถ้าไม่ใช่ ให้
- รถหยุดวิ่ง
- หน่วงเวลาการทำงาน 0.1 วินาที
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
เมื่อเซ็นเซอร์แสงได้รับแสงจากไฟฉาย รถจะวิ่งไปข้างหน้าเพื่อหนีแสง ตามที่ได้เขียนโปรแกรมไว้
โครงงานรถบังคับ
โครงงานนี้ใช้บอร์ด KidBright32/OpenKB จำนวน 2 ตัว โดยตัวที่ 1 ติดอยู่กับรถและบอร์ด KidMotor V3 และตัวที่ 2 เป็นรีโมทควบคุม
การรับ-ส่งสัญญาณควบคุมรถใช้ ESP-NOW ซึ่งติดตั้งปลั๊กอินเสริมชื่อ ESP-NOW ตามขั้นตอนดังนี้
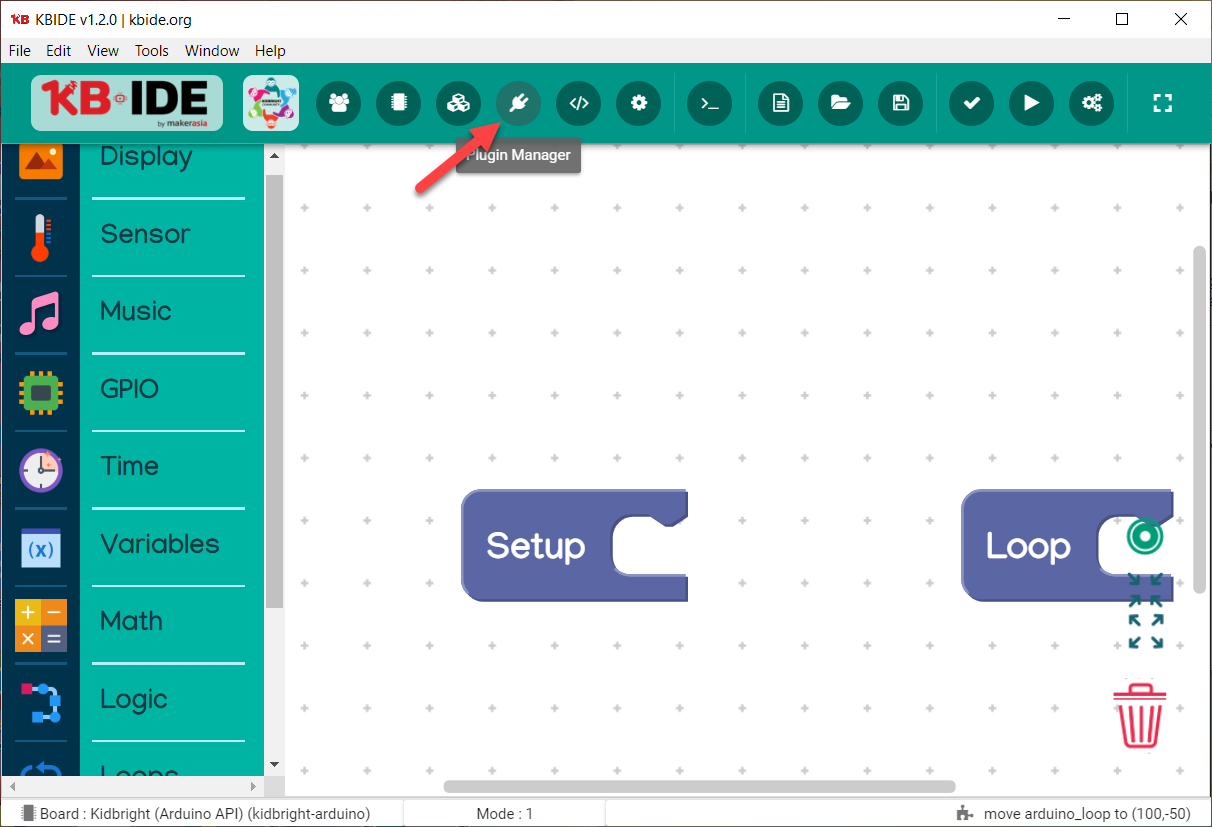
ติดตั้งปลั๊กอิน ESP-NOW โดยกดที่เมนู Plugin
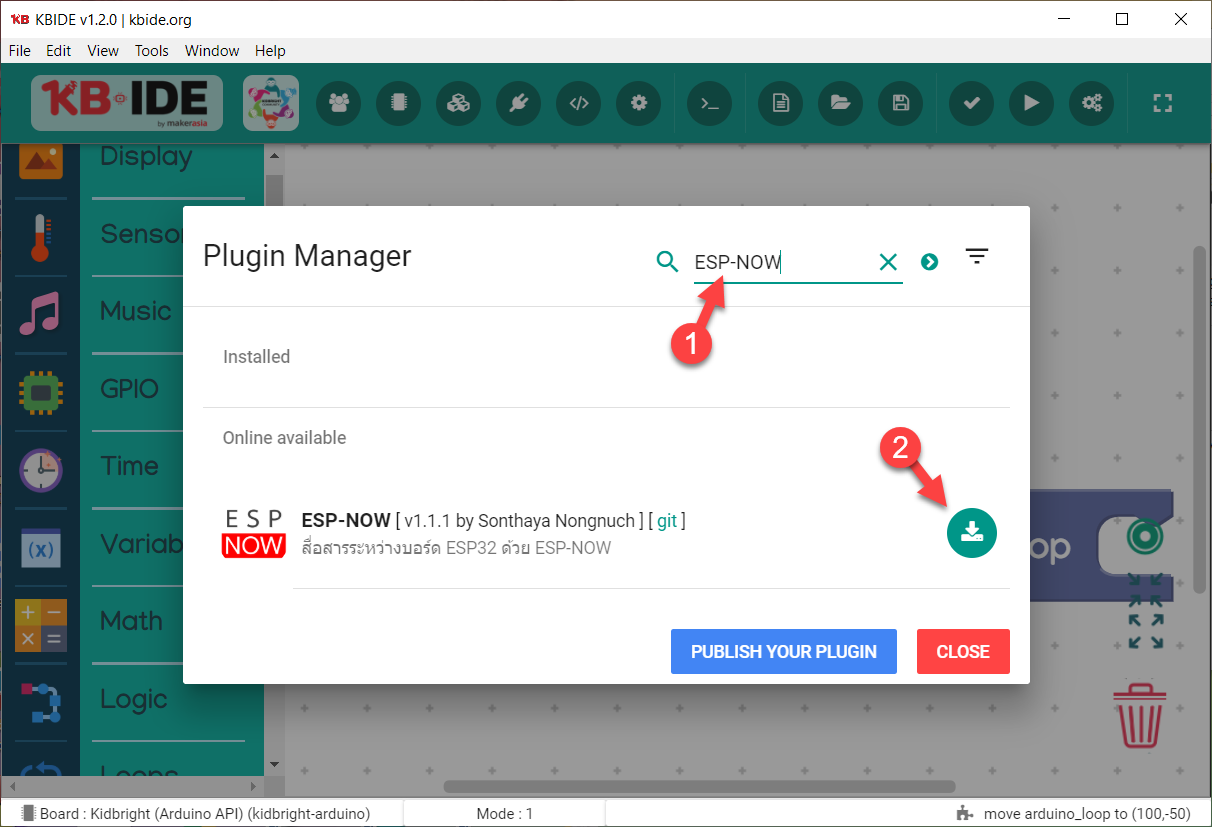
ช่องค้นหา พิมพ์ ESP-NOW (1) จากนั้นกดปุ่มติดตั้ง (2)
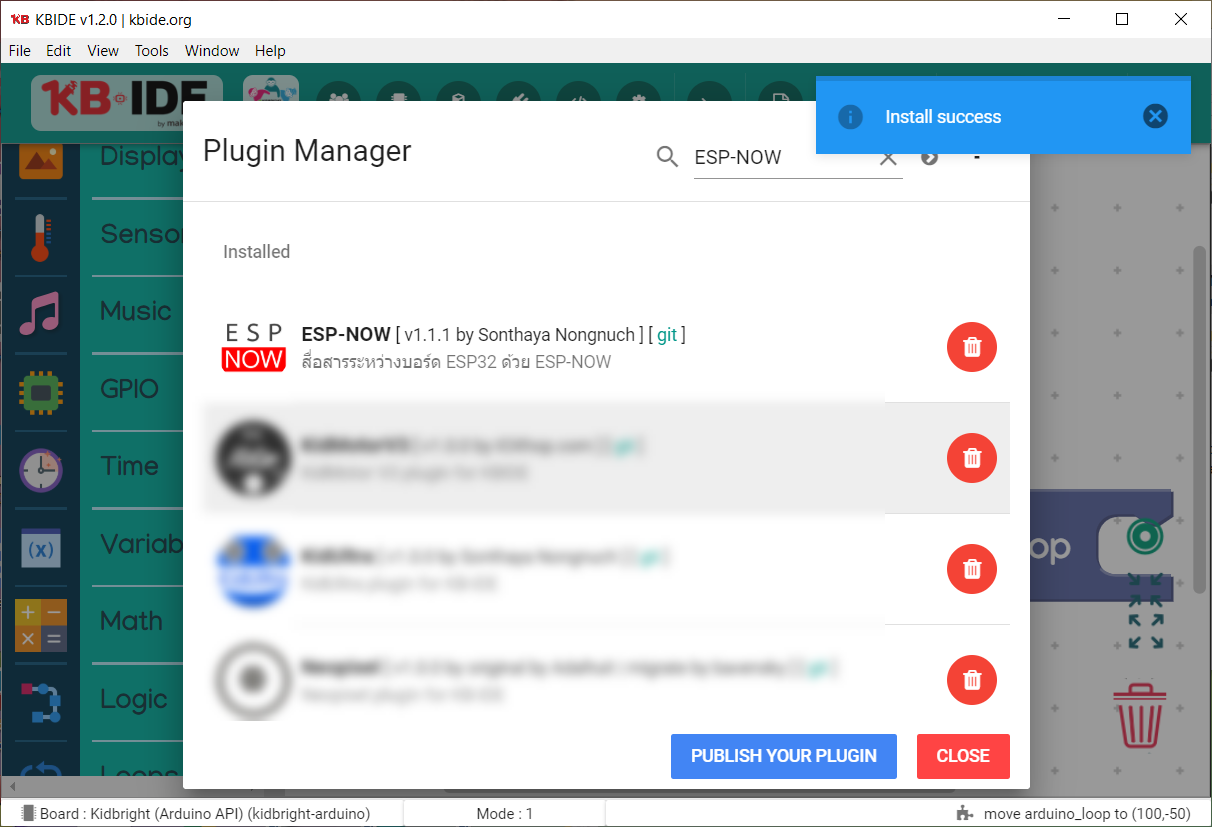
เมื่อติดตั้งเสร็จแล้ว ชื่อ ESP-NOW จะขึ้นมาอยู่ในรายการ Installed (ดังรูป) ให้กดปิดหน้าต่าง Plugin Manager ไปได้เลย
หลังจากติดตั้งปลั๊กอิน ESP-NOW เสร็จแล้ว กดที่เมนู Plugin > ESP-NOW ก็จะมีบล็อกใหม่เพิ่มเข้ามาแล้ว

เขียนโปรแกรมที่ฝั่งรถดังนี้
หลักการทำงานของโปรแกรม
- ใช้บล็อก ESP-NOW เมื่อได้รับข้อมูล กำหนดให้ทำโปรแกรมภายใต้บล็อกนี้เมื่อได้รับข้อมูลจาก ESP-NOW
- ใช้บล็อก ESP-NOW อ่านตัวเลข อ่านข้อมูลแบบตัวเลขจาก ESP-NOW แล้วเก็บลงตัวแปร x
- แสดงผลค่าในตัวแปร x บนแอลอีดี 16x8
- ใช้บล็อกเงื่อนไขตรวจสอบว่าค่าในตัวแปร x คือ 1 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้า
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 2 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวซ้าย
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 3 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวขวา
- ถ้าไม่ตรงกับเงื่อนไขใดเลย ให้
- สั่งให้รถหยุดวิ่ง
- ใช้บล็อกวนรอบ กำหนดโปรแกรมภายใต้บล็อกนี้ทำงานตลอดเวลา
- หน่วงเวลา 0.5 วินาที
ที่ฝั่งรีโมทเขียนโปรแกรมดังนี้
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ กำหนดโปรแกรมภายใต้บล็อกนี้ทำงานตลอดเวลา
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 1 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 2 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 3 ผ่าน ESP-NOW
- ถ้าไม่ตรงกับเงื่อนไขใดเลย
- ส่งเลข 0 ผ่าน ESP-NOW
- หน่วงเวลา 0.05 วินาที
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
หลังจากอัพโหลดโปรแกรมที่ฝั่งรถและฝั่งรีโมทแล้ว ทดสอบการทำงานดังนี้
- กดปุ่ม S1 และ S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 1 และรถวิ่งไปข้างหน้า
- กดปุ่ม S1 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวซ้าย
- กดปุ่ม S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวขวา
- ไม่กดปุ่มใดเลย ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 0 และรถหยุดวิ่ง
กรณีรถวิ่งทิศทางไม่ถูกต้อง ให้อ่านวิธีแก้ไขได้ในภาคผนวก
เขียนโปรแกรมสั่งงานด้วย microBlock IDE
รองรับการเขียนโปรแกรมสั่งงานบอร์ด KidBright32 ทุกรุ่น บอร์ด OpenKB บอร์ด IPST-WiFi โดยมีขั้นตอนการเริ่มต้นใช้งานดังนี้
ติดตั้งปลั๊กอิน KidMotor V3
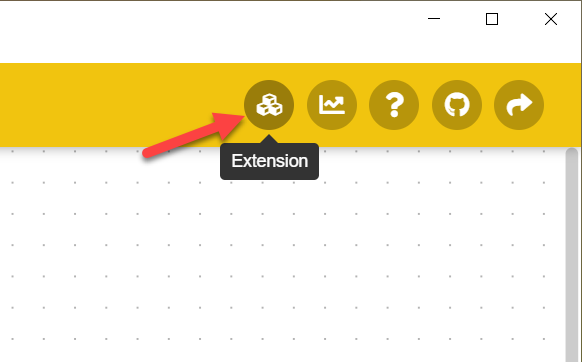
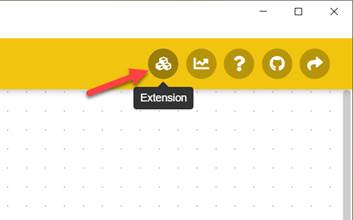
เปิดโปรแกรม microBlock IDE ขึ้นมา กดปุ่ม Extension
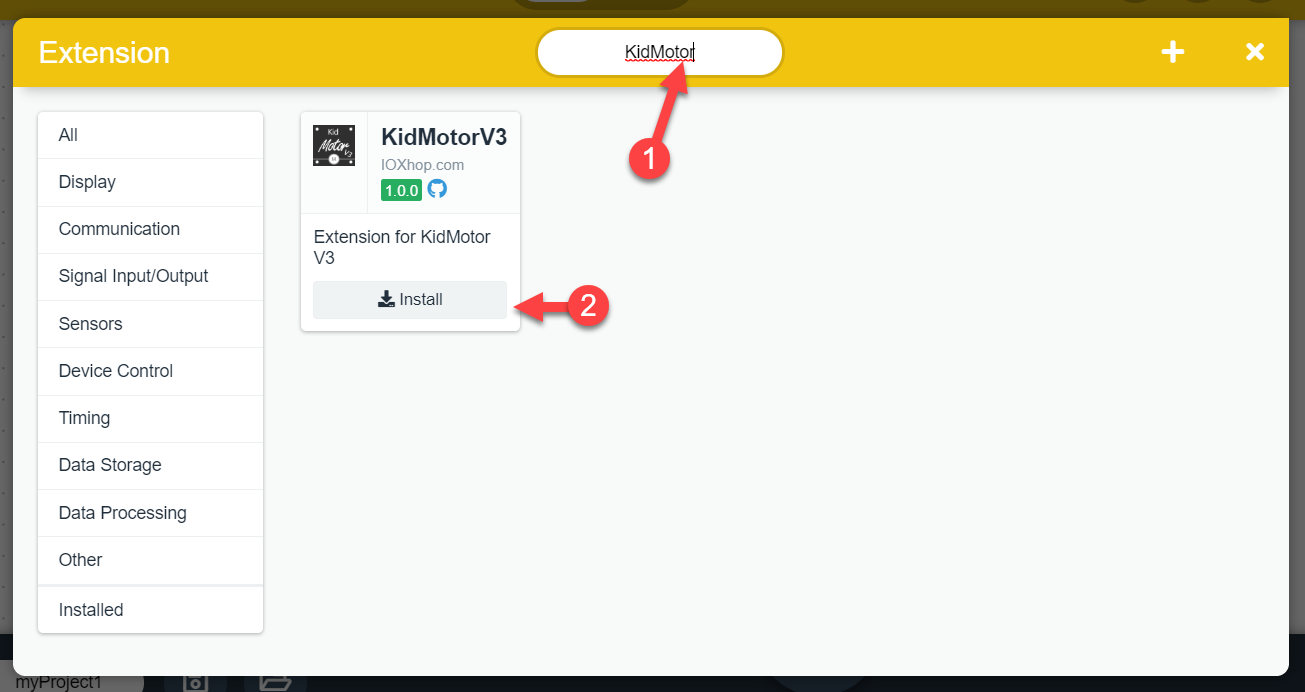
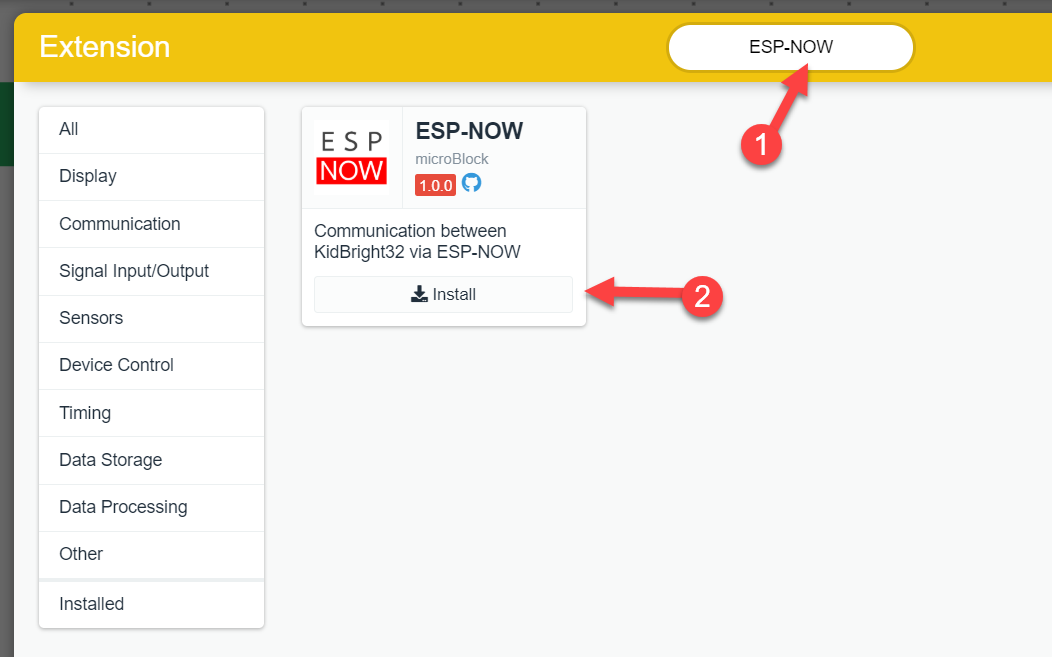
หน้าต่าง Extension จะเปิดขึ้นมา ให้ค้นหา KidMotor (1) แล้วกดปุ่ม Install (2)
รอจนกว่าจะติดตั้งเสร็จ เมื่อติดตั้งเสร็จแล้วจะมีเครื่องหมายถูกแสดง (1) ให้กดปิดหน้าต่างไปได้เลย (2)
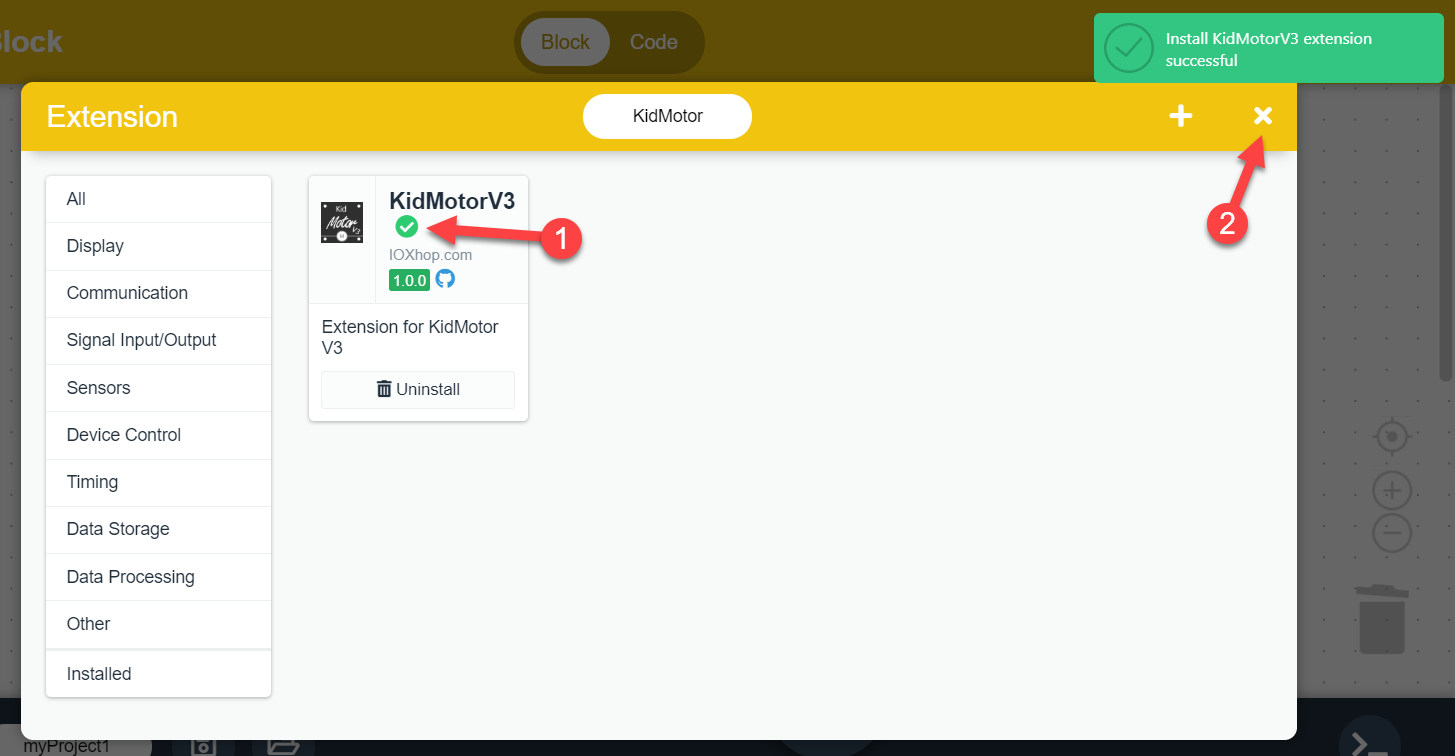
ที่หมวด KidMotorV3 จะมีบล็อกเพิ่มขึ้นมาแล้ว
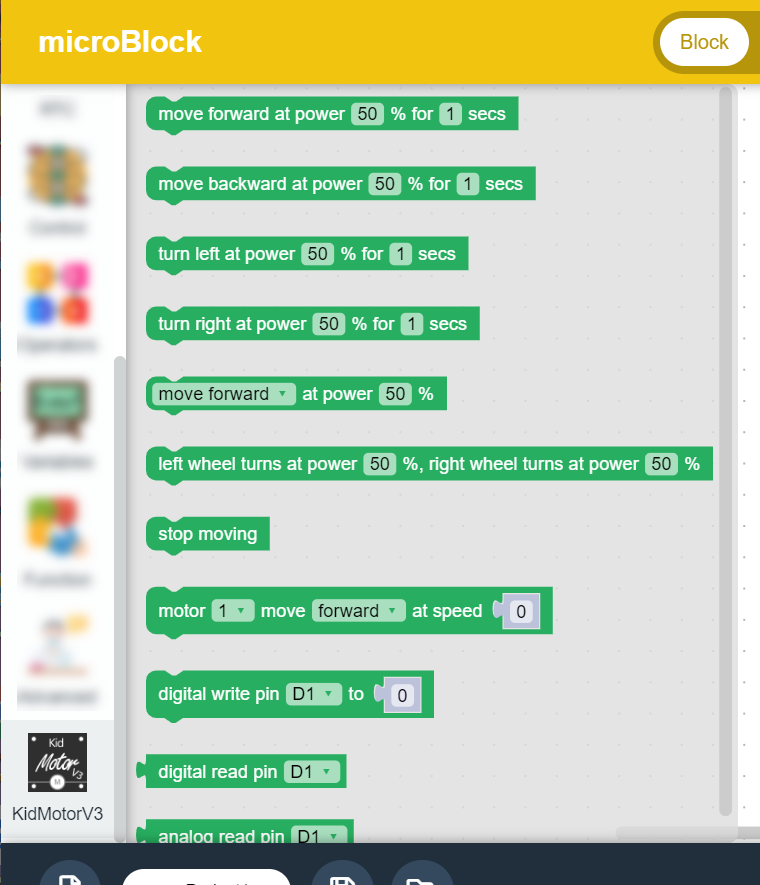
การเขียนโปรแกรมสั่งงานมอเตอร์
ปลั๊กอิน KidMotor V3 ได้จัดเตรียมบล็อกคำสั่งสำหรับสั่งงานมอเตอร์โดยแบ่งเป็น 2 กลุ่ม คือกลุ่มบล็อกสำหรับสั่งงานหุ่นยนต์ (รถ) มีบล็อกดังนี้
บล็อกวิ่งไปข้างหน้า ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกวิ่งถอยหลัง ใช้สั่งให้หุ่นยนต์วิ่งถอยหลัง ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวซ้าย ใช้สั่งให้หุ่นยนต์เลี้ยวซ้าย (มอเตอร์ซ้ายหยุดหมุน มอเตอร์ขวาหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อกเลี้ยวขวา ใช้สั่งให้หุ่นยนต์เลี้ยวขวา (มอเตอร์ซ้ายหมุน มอเตอร์ขวาหยุดหมุน) ด้วยความเร็ว และเวลาที่กำหนด โดยเมื่อครบเวลาแล้ว หุ่นยนต์จะหยุดวิ่งอัตโนมัติ

บล็อก...ด้วยความเร็ว ใช้สั่งให้หุ่นยนต์วิ่งไปข้างหน้า/ถอยหลัง/เลี้ยวซ้าย/เลี้ยวขวา ด้วยความเร็วที่กำหนด

บล็อกล้อซ้าย/ขวาหมุน ใช้สั่งให้หุ่นยนต์วิ่งตามรูปแบบที่กำหนดโดยกำหนดความเร็วของล้อแต่ละข้าง หากกำหนดเป็นค่าบวก 1 ถึง 100 ล้อจะหมุนไปด้านหน้า หากกำหนดค่าเป็นลบ -1 ถึง -100 ล้อจะหมุนไปด้านหลัง หากกำหนดเป็น 0 ล้อจะหยุดหมุน

บล็อกหยุดวิ่ง ใช้สั่งให้หุ่นยนต์หยุดวิ่ง (มอเตอร์ทุกตัวหยุดหมุน)
กลุ่มบล็อกสั่งงานมอเตอร์ มีดังนี้
มอเตอร์...หมุน... ที่ความเร็ว ใช้กำหนดทิศทางและความเร็วของมอเตอร์ที่กำหนด

การเขียนโปรแกรมควบคุมอินพุต/เอาต์พุต
เขียนค่าดิจิทัล ใช้สั่งให้ช่อง D1 ถึง D5 ส่งสัญญาณดิจิทัลลอจิก 0 หรือ 1

อ่านค่าดิจิทัล ใช้อ่านค่าดิจิทัลที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็มตามลอจิกที่อ่านได้

อ่านค่าแอนะล็อก ใช้อ่านค่าแอนะล็อกที่ช่อง D1 ถึง D5 ให้ค่าเป็นตัวเลขจำนวนเต็ม 0 ถึง 4095

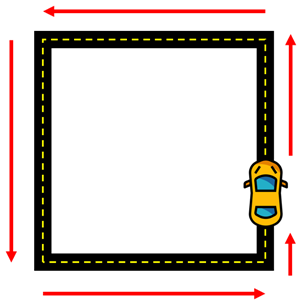
โครงงานรถวิ่งตามโปรแกรม
ตัวอย่างเขียนโปรแกรมให้รถวิ่งตามทิศทางเป็นสี่เหลี่ยมดังนี้
เขียนโปรแกรมได้ดังนี้
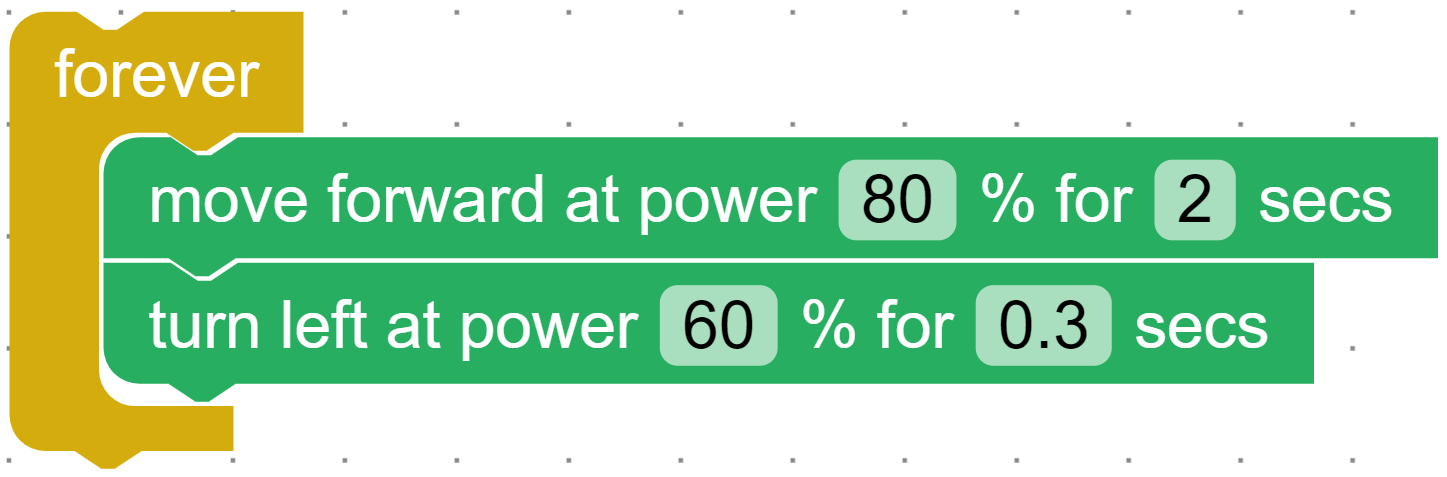
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้บล็อกวิ่งไปข้างหน้า เพื่อให้รถวิ่งไปข้างหน้า ตามระยะทางที่กำหนดด้วยเวลา ด้วยความเร็ว 80%
- ใช้บล็อกเลี้ยวซ้าย เพื่อสั่งให้เลี้ยวซ้าย กำหนดระยะเลี้ยวด้วยเวลา ด้วยความเร็วในการเลี้ยว 60%
รถจะวิ่งตรงแล้วเลี่ยวซ้ายไปเรื่อย ๆ ไปเป็นสี่เหลี่ยม
โครงงานรถวิ่งหนีแสง
เมื่อนำแสงเข้าไปใกล้กับตัวรถ รถจะวิ่งไปข้างหน้าเพื่อหนีแสง
โครงงานนี้ใช้เซ็นเซอร์ตรวจจับแสงบนบอร์ด KidBright32 / OpenKB เขียนโปรแกรมได้ดังนี้
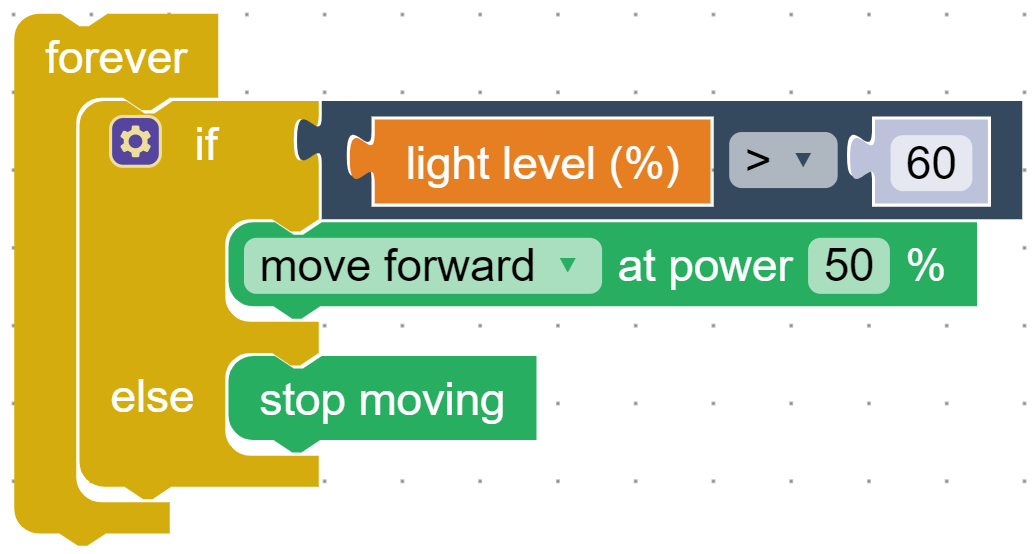
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ เพื่อกำหนดให้โค้ดโปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้าด้วยความเร็ว 60%
- ถ้าไม่ใช่ ให้
- รถหยุดวิ่ง
- หน่วงเวลาการทำงาน 0.1 วินาที
- ใช้เงื่อนไข ตรวจสอบว่าเซ็นเซอร์แสงอ่านค่าแสงได้มากกว่า 60% หรือไม่ ถ้าใช่
เมื่อเซ็นเซอร์แสงได้รับแสงจากไฟฉาย รถจะวิ่งไปข้างหน้าเพื่อหนีแสง ตามที่ได้เขียนโปรแกรมไว้
โครงงานรถบังคับ
โครงงานนี้ใช้บอร์ด KidBright32/OpenKB จำนวน 2 ตัว โดยตัวที่ 1 ติดอยู่กับรถและบอร์ด KidMotor V3 และตัวที่ 2 เป็นรีโมทควบคุม
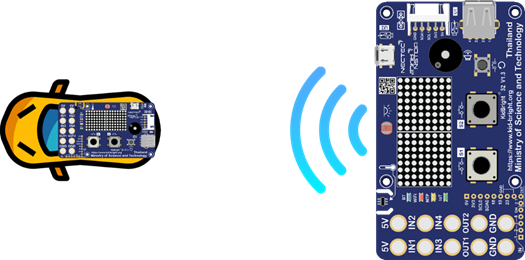
การรับ-ส่งสัญญาณควบคุมรถใช้ ESP-NOW ซึ่งติดตั้งปลั๊กอินเสริมชื่อ ESP-NOW ตามขั้นตอนดังนี้
ติดตั้งปลั๊กอิน ESP-NOW โดยกดที่เมนู Plugin
ช่องค้นหา พิมพ์ ESP-NOW (1) จากนั้นกดปุ่ม Install (2)
รอจนกว่าจะติดตั้งเสร็จ เมื่อติดตั้งเสร็จแล้วจะมีเครื่องหมายถูกแสดง (1) ให้กดปิดหน้าต่างไปได้เลย (2)
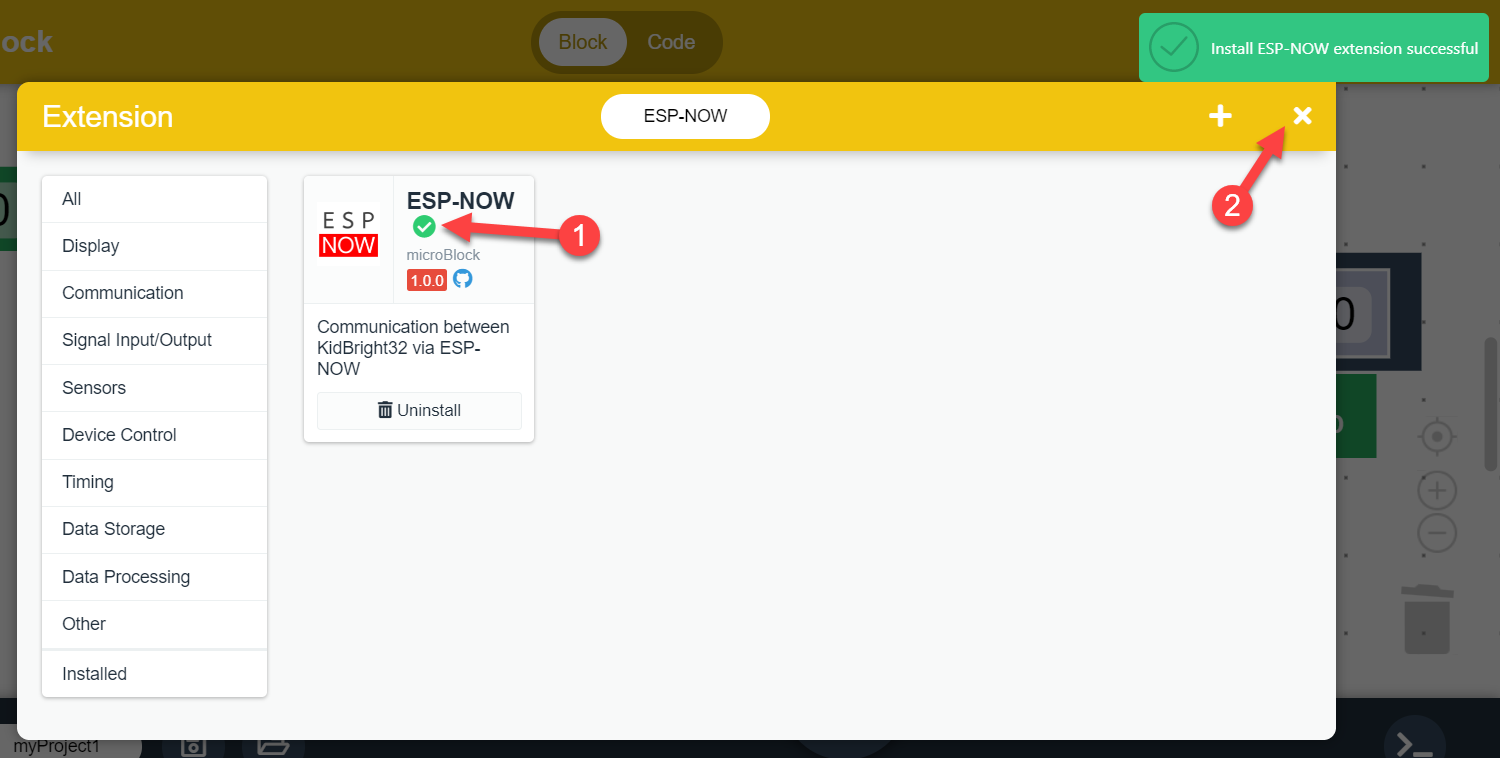
ที่หมวด KidMotorV3 จะมีบล็อกเพิ่มขึ้นมาแล้ว

เขียนโปรแกรมที่ฝั่งรถดังนี้
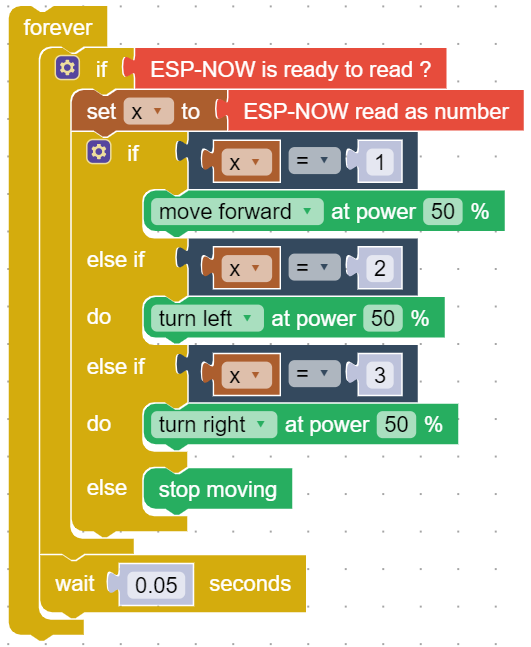
หลักการทำงานของโปรแกรม
- ใช้วนรอบ สั่งให้โปรแกรมต่อไปนี้ทำงานตลอดเวลา
- ใช้บล็อกเงื่อนไข ตรวจสอบว่าขณะนี้อ่านข้อมูลจาก ESP-NOW ได้หรือไม่ ถ้าได้ ให้ทำโค้ดต่อไปนี้
- ใช้บล็อก ESP-NOW อ่านตัวเลข อ่านข้อมูลแบบตัวเลขจาก ESP-NOW แล้วเก็บลงตัวแปร x
- แสดงผลค่าในตัวแปร x บนแอลอีดี 16x8
- ใช้บล็อกเงื่อนไขตรวจสอบว่าค่าในตัวแปร x คือ 1 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถวิ่งไปข้างหน้า
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 2 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวซ้าย
- ถ้าไม่ใช่ ตรวจสอบว่า x คือ 3 ใช่หรือไม่ ถ้าใช่
- สั่งให้รถเลี้ยวขวา
- ถ้าไม่ตรงกับเงื่อนไขใดเลย ให้
- สั่งให้รถหยุดวิ่ง
- ใช้บล็อก ESP-NOW อ่านตัวเลข อ่านข้อมูลแบบตัวเลขจาก ESP-NOW แล้วเก็บลงตัวแปร x
- หน่วงเวลา 0.05 วินาที
- ใช้บล็อกเงื่อนไข ตรวจสอบว่าขณะนี้อ่านข้อมูลจาก ESP-NOW ได้หรือไม่ ถ้าได้ ให้ทำโค้ดต่อไปนี้
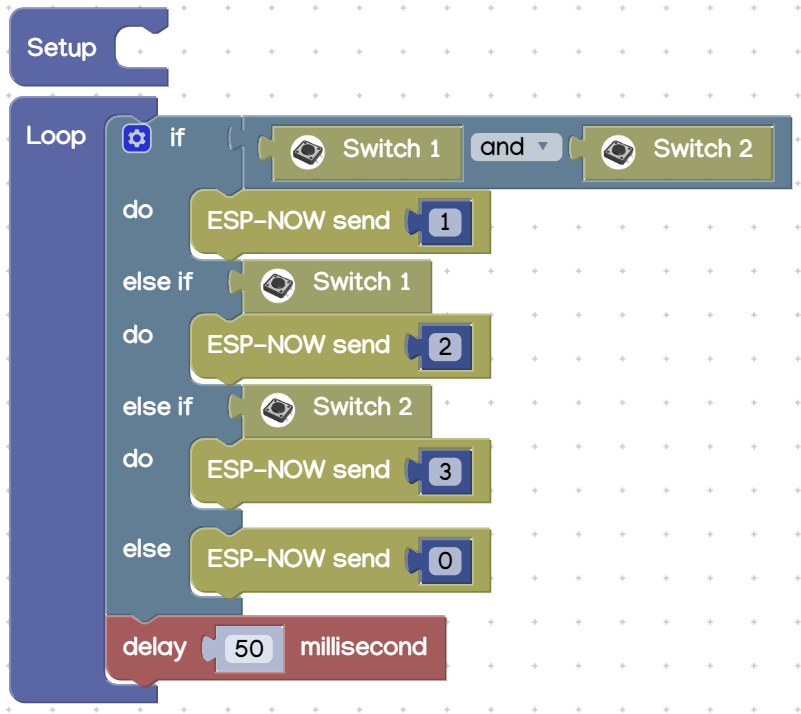
ที่ฝั่งรีโมทเขียนโปรแกรมดังนี้
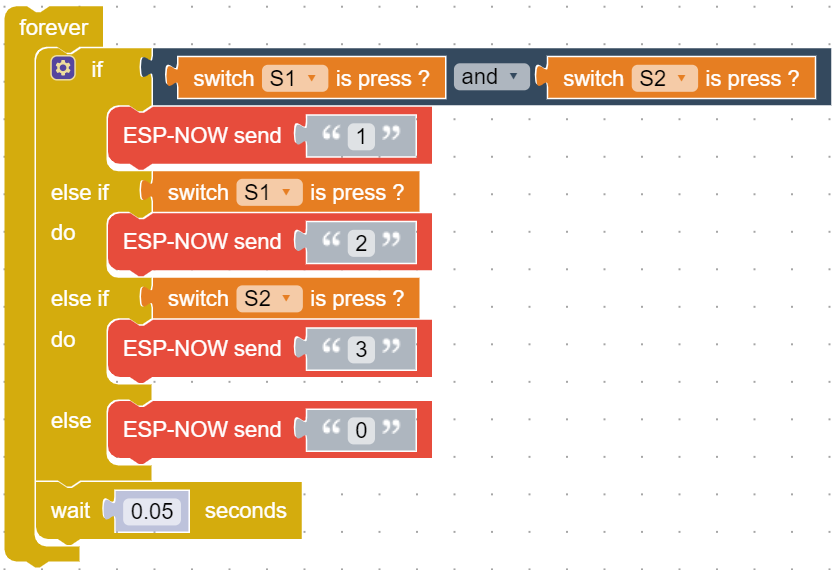
หลักการทำงานของโปรแกรม
- ใช้บล็อกวนรอบ กำหนดโปรแกรมภายใต้บล็อกนี้ทำงานตลอดเวลา
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 1 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 2 ผ่าน ESP-NOW
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 กดอยู่หรือไม่ ถ้าใช่
- ส่งเลข 3 ผ่าน ESP-NOW
- ถ้าไม่ตรงกับเงื่อนไขใดเลย
- ส่งเลข 0 ผ่าน ESP-NOW
- หน่วงเวลา 0.05 วินาที
- ใช้บล็อกเงื่อนไขตรวจสอบว่าสวิตช์ 1 และสวิตช์ 2 กดอยู่หรือไม่ ถ้าใช่
หลังจากอัพโหลดโปรแกรมที่ฝั่งรถและฝั่งรีโมทแล้ว ทดสอบการทำงานดังนี้
- กดปุ่ม S1 และ S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 1 และรถวิ่งไปข้างหน้า
- กดปุ่ม S1 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวซ้าย
- กดปุ่ม S2 ฝั่งรีโมทค้างไว้ ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 2 และรถเลี้ยวขวา
- ไม่กดปุ่มใดเลย ที่ฝั่งรถ แอลอีดี 16x8 จะแสดงเลข 0 และรถหยุดวิ่ง
กรณีรถวิ่งทิศทางไม่ถูกต้อง ให้อ่านวิธีแก้ไขได้ในภาคผนวก
อ่านบทอื่น ๆ ได้ที่
- คู่มือการใช้งาน KidMotor V3 บทที่ 1 ข้อมูลเกี่ยวกับบอร์ด KidMotor V3
- คู่มือการใช้งาน KidMotor V3 บทที่ 2 การต่อวงจร KidMotor V3
- คู่มือการใช้งาน KidMotor V3 บทที่ 3 การเขียนโปรแกรมสั่งงานอุปกรณ์ผ่าน KidMotor
- คู่มือการใช้งาน KidMotor V3 การแก้ปัญหารถวิ่งผิดทิศทาง
อ่านเอกสารคู่มือการใช้งานรูปแบบ PDF ได้ที่ คู่มือการใช้งาน KidMotor V3.pdf

 ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266




TOP เลื่อนขึ้นบนสุด
