

รายละเอียดสินค้า
| ไฮไลท์ |
ใช้งานร่วมกับเซอร์โวมอเตอร์ได้ทุกรุ่น รองรับการจ่ายไฟเลี้ยงภายนอก 5V ผ่านเทอมินัล และ DC jack ใช้ไอซี PCA9685 มีโค้ดโปรแกรมไพทอนให้
|
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
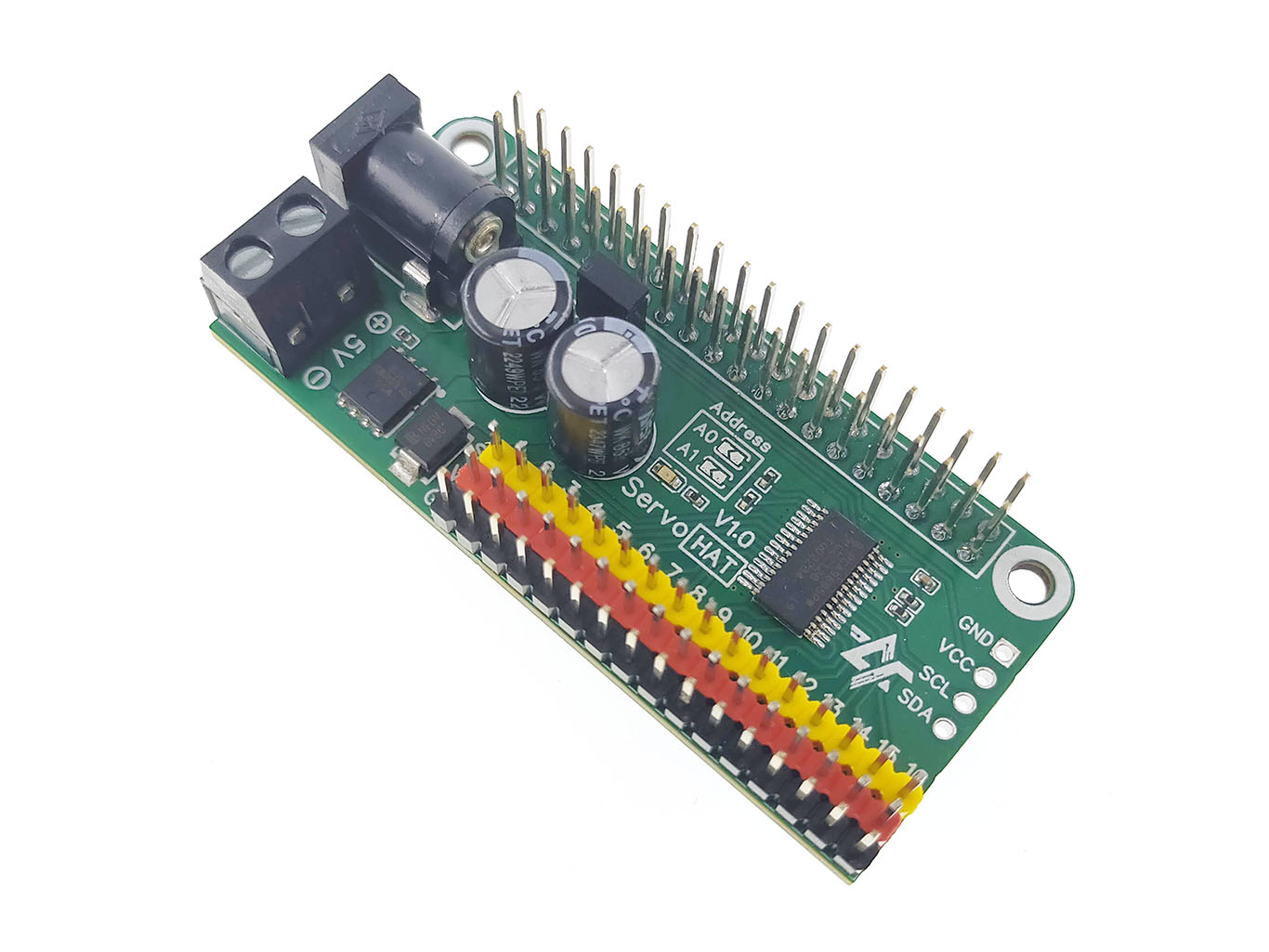
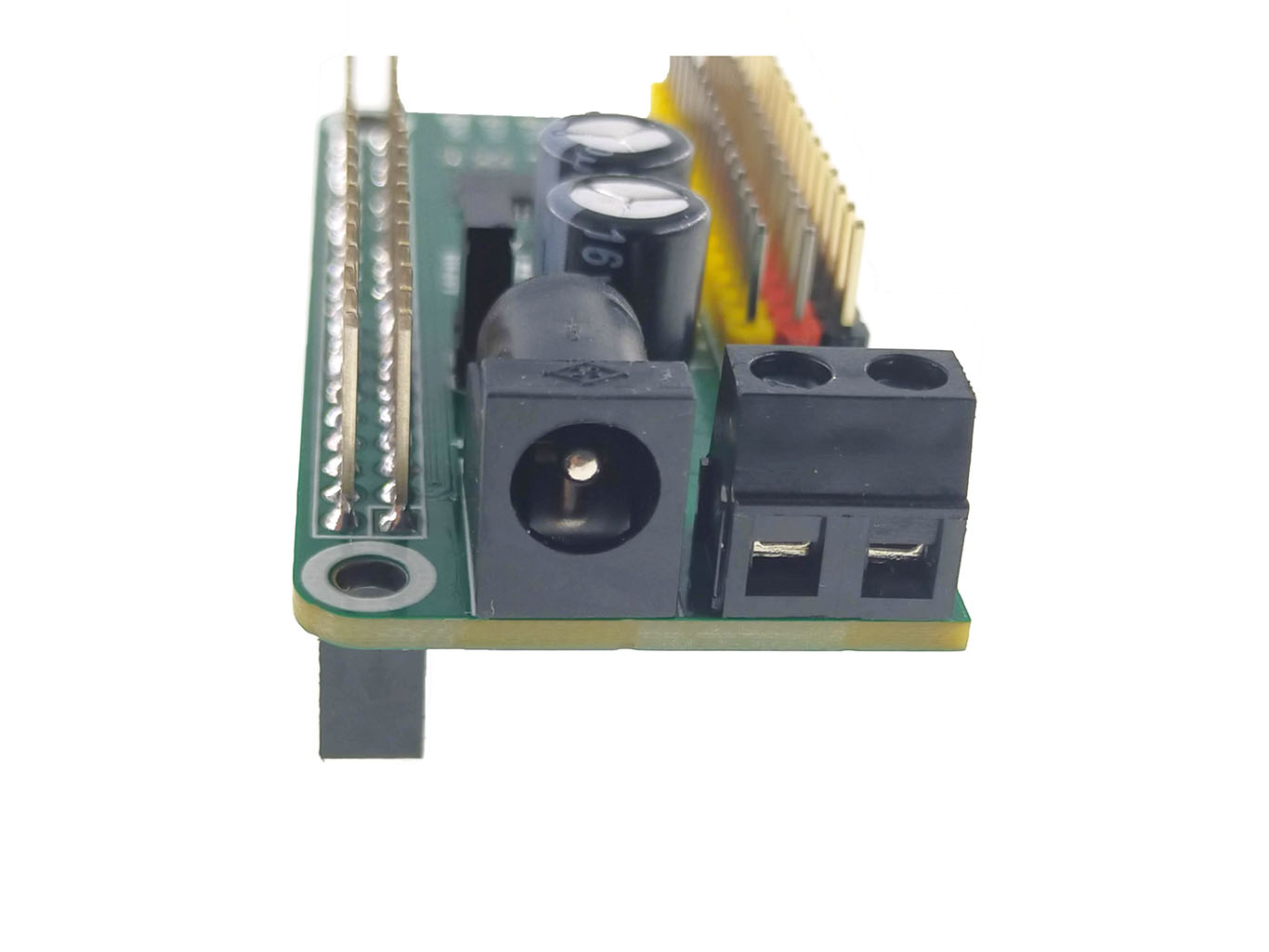
ArtronShop Servo HAT โมดูลเสริม Raspberry Pi ขยายช่องต่อเซอร์โว 16 ช่อง รองรับการใช้งานร่วมกับเซอร์โวมอเตอร์ทุกรุ่น รองรับการจ่ายไฟเลี้ยงภายนอก 5V เลี้ยงเซอร์โวมอเตอร์และ Raspberry Pi ผ่านเทอมินัล และ DC jack ใช้ไอซี PCA9685 มีโค้ดโปรแกรมตัวอย่างภาษาไพทอน (Python) ให้ ใช้งานร่วมกับ Robot Operating System (ROS) ได้ รายละเอียดเชิงเทคนิค
สินค้าประกอบด้วย
เอกสารเพิ่มเติม
การใช้งานต่อเซอร์โวมอเตอร์, แหล่งจ่ายไฟภายนอก ดังรูป
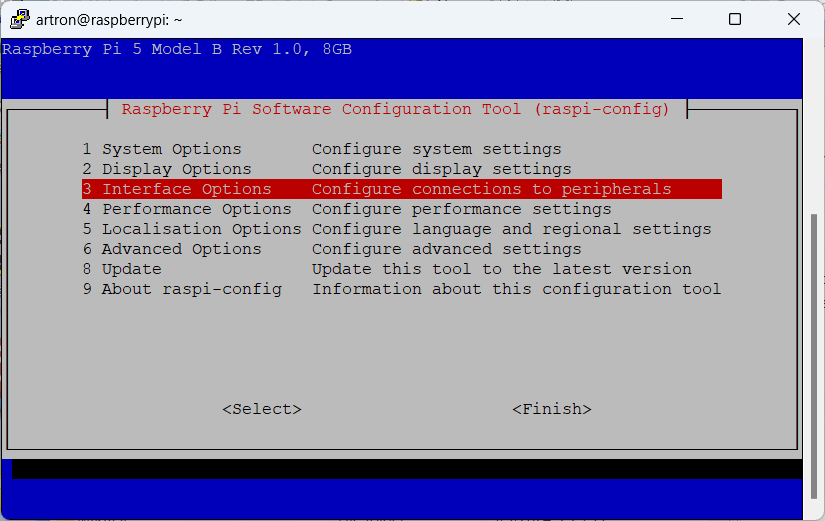
SSH เข้าไปที่บอร์ด Raspberry Pi (อ่านขั้นตอนได้ที่บทความ รู้จักและเริ่มต้นใช้งาน Raspberry Pi 5 คอมพิวเตอร์บอร์ดเดียว (Single-board computer)) แล้วสั่งเปิดใช้งาน I2C1 โดยใช้พิมพ์คำสั่ง sudo raspi-config แล้วเลื่อนไปที่หัวข้อ Interface Options
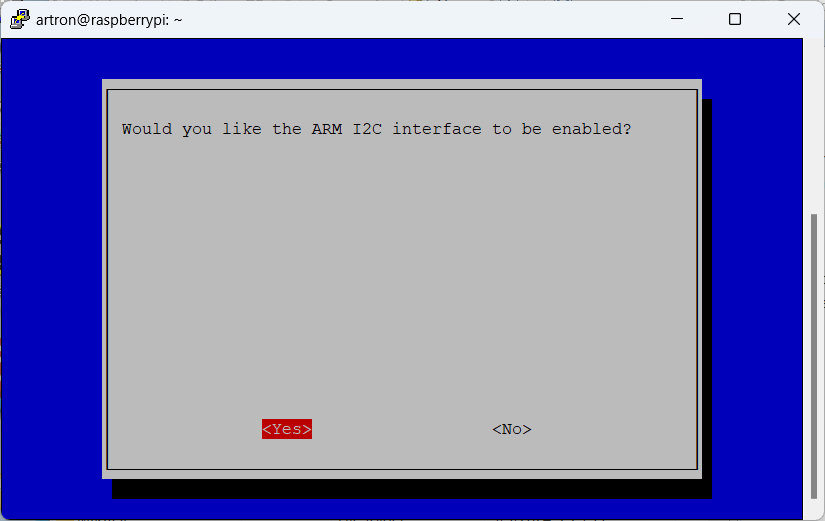
เลือกหัวข้อ I2C แล้วกดปุ่ม Enter
เลือก Yes แล้วกดปุ่ม Enter เพื่อยืนยันเปิดใช้ I2C
กดปุ่ม Enter เพื่อปิดหน้าต่าง
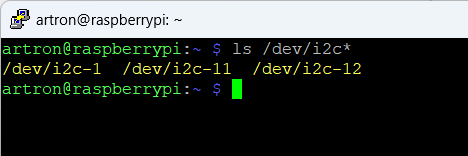
ใช้คำสั่ง ls /dev/i2c* จะต้องแสดงดังรูป
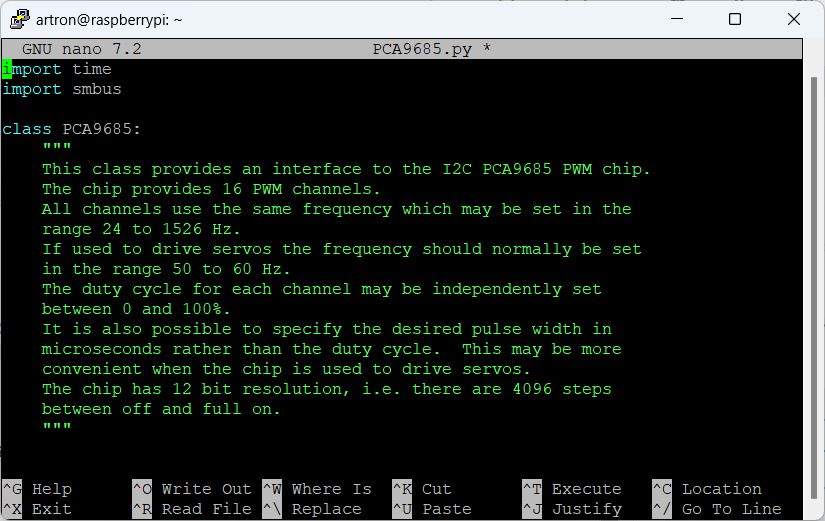
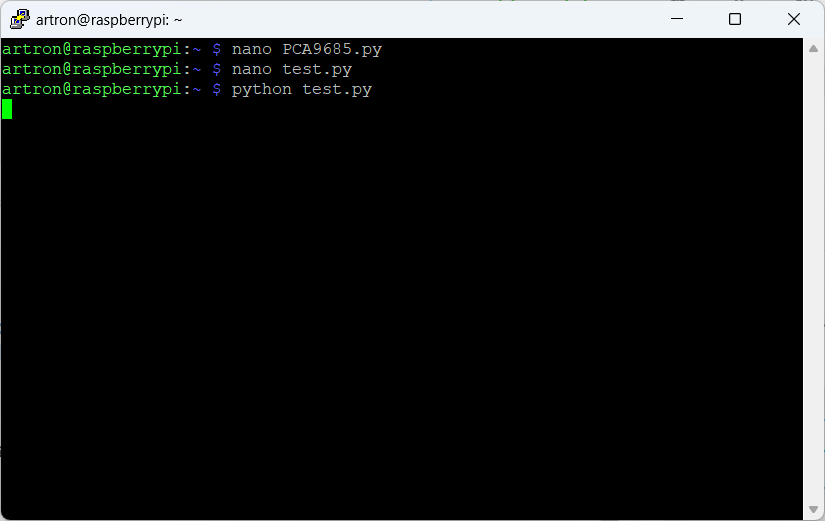
ใช้คำสั่ง nano PCA9685.py เพื่อสร้างไฟล์ไลบรารี่ PCA9685.py
แล้วคัดลอกโค้ดโปรแกรมต่อไปนี้ลง Terminal (กดที่รูปเพื่อดาวน์โหลดโค้ด) 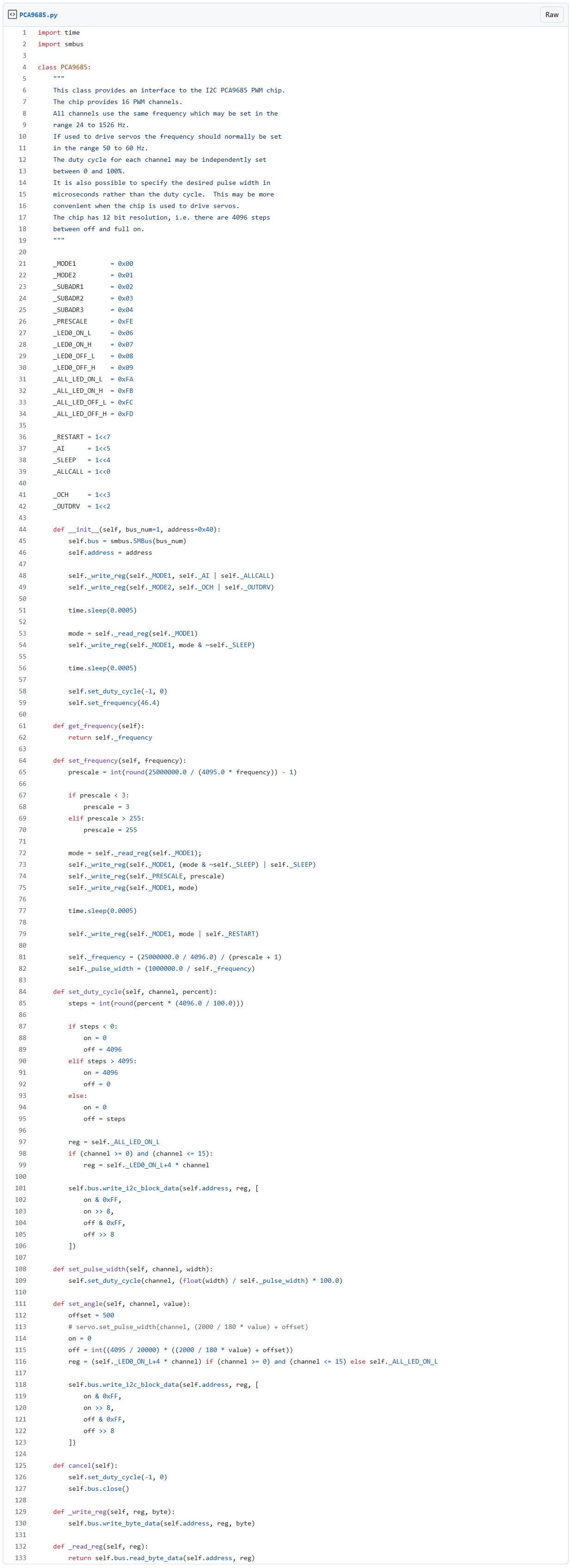
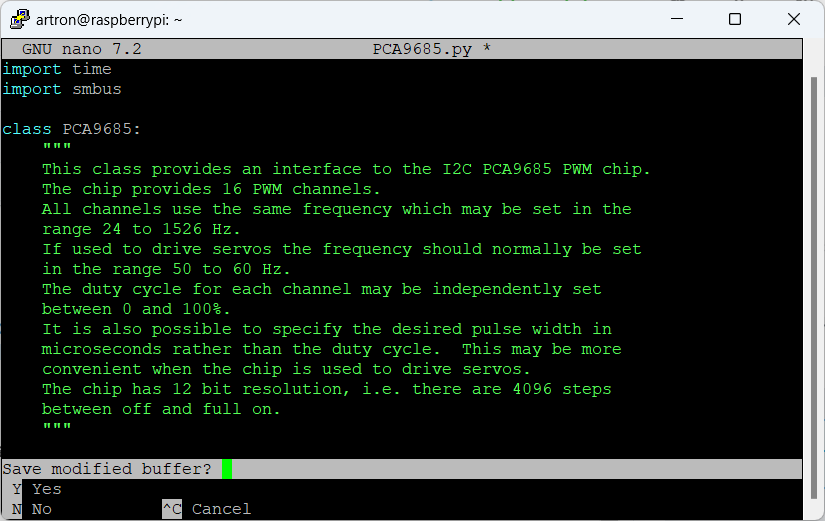
กดปุ่ม Ctrl + X บนคีย์บอร์ด พิมพ์ Y แล้วกด Enter
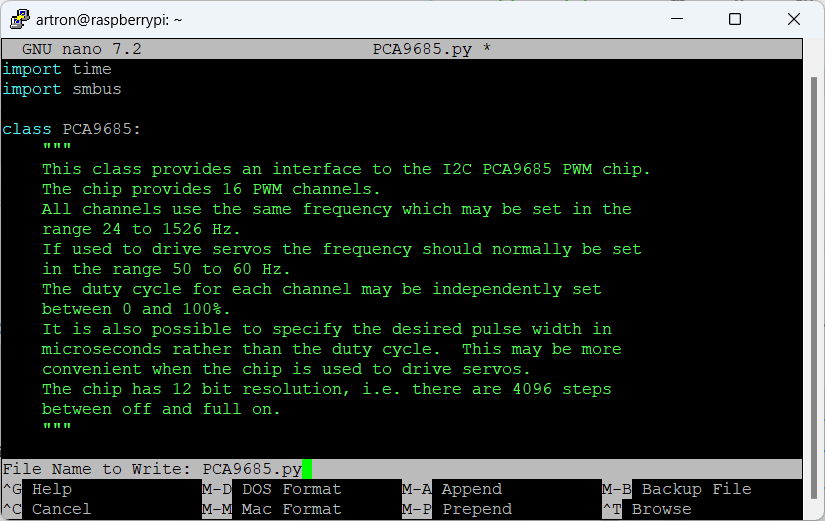
กด Enter
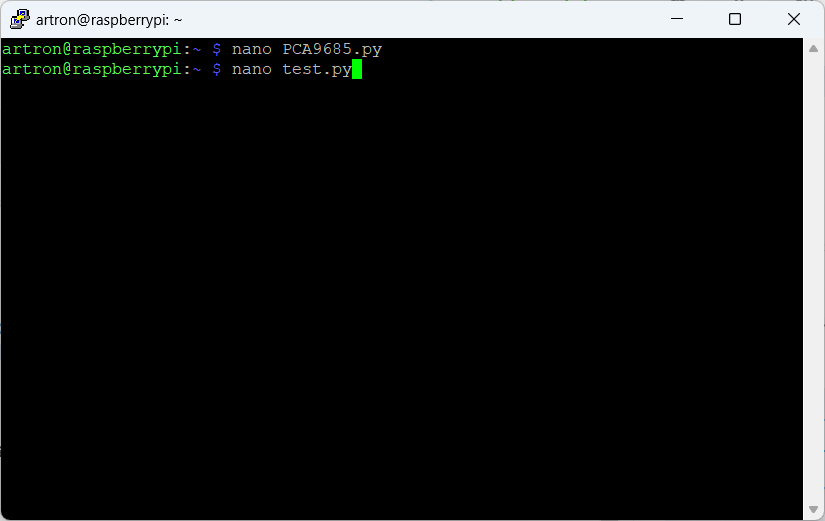
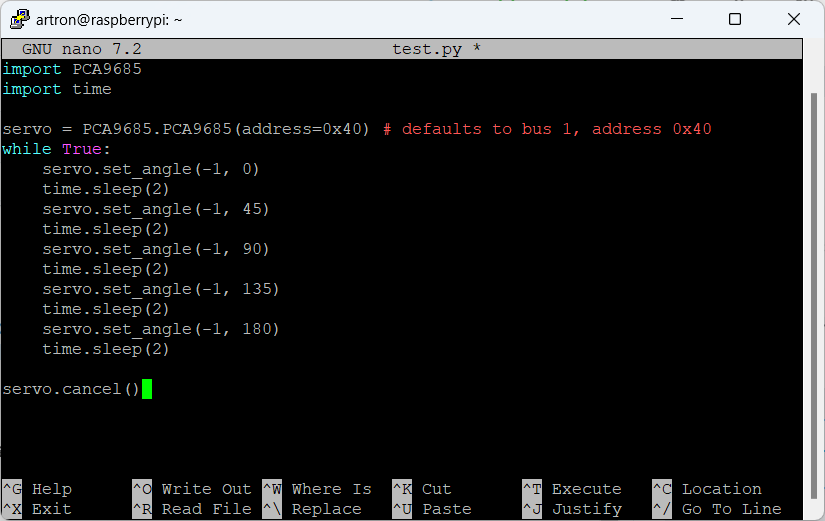
สร้างไฟล์โค้ดโปรแกรมหลัก ด้วยคำสั่ง nano test.py
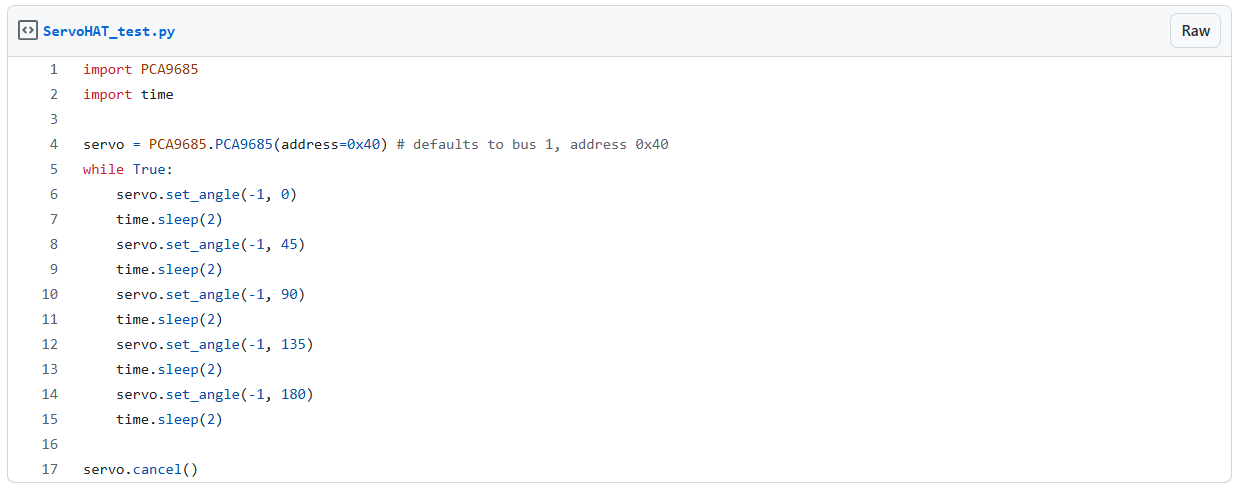
ใส่โค้ดต่อไปนี้ลงไป (กดที่รูปเพื่อดาวน์โหลดโค้ด)
กดปุ่ม Ctrl + X แล้วกด Enter 2 ครั้ง เพื่อบันทึกไฟล์ จากนั้นสั่งให้โค้ดโปรแกรม Python ทำงานด้วยคำสั่ง python test.py
ผลที่ได้ เซอร์โวทุกช่องจะหมุน 0, 45, 90, 135, 180 องศา ตามลำดับ คำสั่งที่มีให้ใช้งานPCA9685(bus_num=1, address=0x40)คลาส PCA9685 ประกอบด้วยพารามิเตอร์ ดังนี้
ตัวอย่างการใช้งาน import PCA9685 (None) set_angle(channel, value)ใช้กำหนดองศาการหมุนของเซอร์โวมอเตอร์ ประกอบด้วยพารามิเตอร์ ดังนี้
ตัวอย่างการใช้งาน servo.set_angle(0, 180) # กำหนดให้เซอร์โวมอเตอร์ช่องที่ 1 หมุนไปที่ 180 องศา servo.set_angle(4, 60) # กำหนดให้เซอร์โวมอเตอร์ช่องที่ 5 หมุนไปที่ 60 องศา
       |
| เงื่อนไขอื่นๆ |
|
| Tags |

 ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ



▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

ArtronShop บอร์ดอิเล็กทรอนิกส์ Arduino ESP32 ESP8266
จำหน่ายบอร์ดไมโครคอนโทรลเลอร์สำหรับ Maker และนักพัฒนา ESP32 ESP8266 NodeMCU โมดูลอิเล็กทรอนิกส์
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม